RViz2展示
功能介绍
TogetheROS.Bot兼容ROS2 foxy版本,为了方便预览图像效果,可以通过RViz2获取图像。
支持平台
| 平台 | 运行方式 | 示例功能 |
|---|---|---|
| 旭日X3派 | Ubuntu 20.04 | 启动MIPI摄像头获取图像,在PC上使用RViz2预览 |
准备工作
旭日X3派
旭日X3派已烧录好地平线提供的Ubuntu 20.04系统镜像。
旭日X3派已成功安装tros.b。
PC已安装Ubuntu 20.04系统、ROS2 Foxy桌面版和数据可视化工具RViz2,并且和旭日X3派在同一网段(IP地址前三位相同)。
ROS2 Foxy安装参考:https://docs.ros.org/en/foxy/Installation/Ubuntu-Install-Debians.html
PC 端 RViz2安装方法为:
sudo apt install ros-foxy-rviz-common ros-foxy-rviz-default-plugins ros-foxy-rviz2
使用方式
旭日X3派
通过SSH登录开发板,启动板端相关程序
vim mipi_cam.launch.py
from launch import LaunchDescription from launch_ros.actions import Node def generate_launch_description(): return LaunchDescription([ # 启动图片发布pkg Node( package='mipi_cam', executable='mipi_cam', output='screen', parameters=[ {"out_format": "bgr8"}, {"image_width": 480}, {"image_height": 272}, {"io_method": "ros"}, {"video_device": "F37"} ], arguments=['--ros-args', '--log-level', 'error'] ) ])
保存然后:
# 配置tros.b环境 source /opt/tros/setup.bash # 启动F37 camera发布BGR8格式图像 ros2 launch mipi_cam mipi_cam.launch.py
注意:out_format请勿随意更改,RViz2只支持RGB8, RGBA8, BGR8, BGRA8等图像格式.
如程序输出如下信息,说明节点已成功启动
[INFO] [launch]: All log files can be found below /root/.ros/log/2022-08-19-03-53-54-778203-ubuntu-2881662 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [mipi_cam-1]: process started with pid [2881781]
旭日X3派新建一个窗口,查询话题命令及返回结果如下:
# 配置tros.b环境 source /opt/tros/setup.bash # 查询topic ros2 topic list
输出:
/image_raw /parameter_events /rosout
PC机上查询当前话题,查询命令及返回结果如下:
# 配置ROS2环境 source /opt/ros/foxy/local_setup.bash ros2 topic list
输出:
/image_raw /parameter_events /rosout
PC机上订阅话题,并预览摄像头数据;
# 配置ROS2环境 source /opt/ros/foxy/local_setup.bash ros2 run rviz2 rviz2
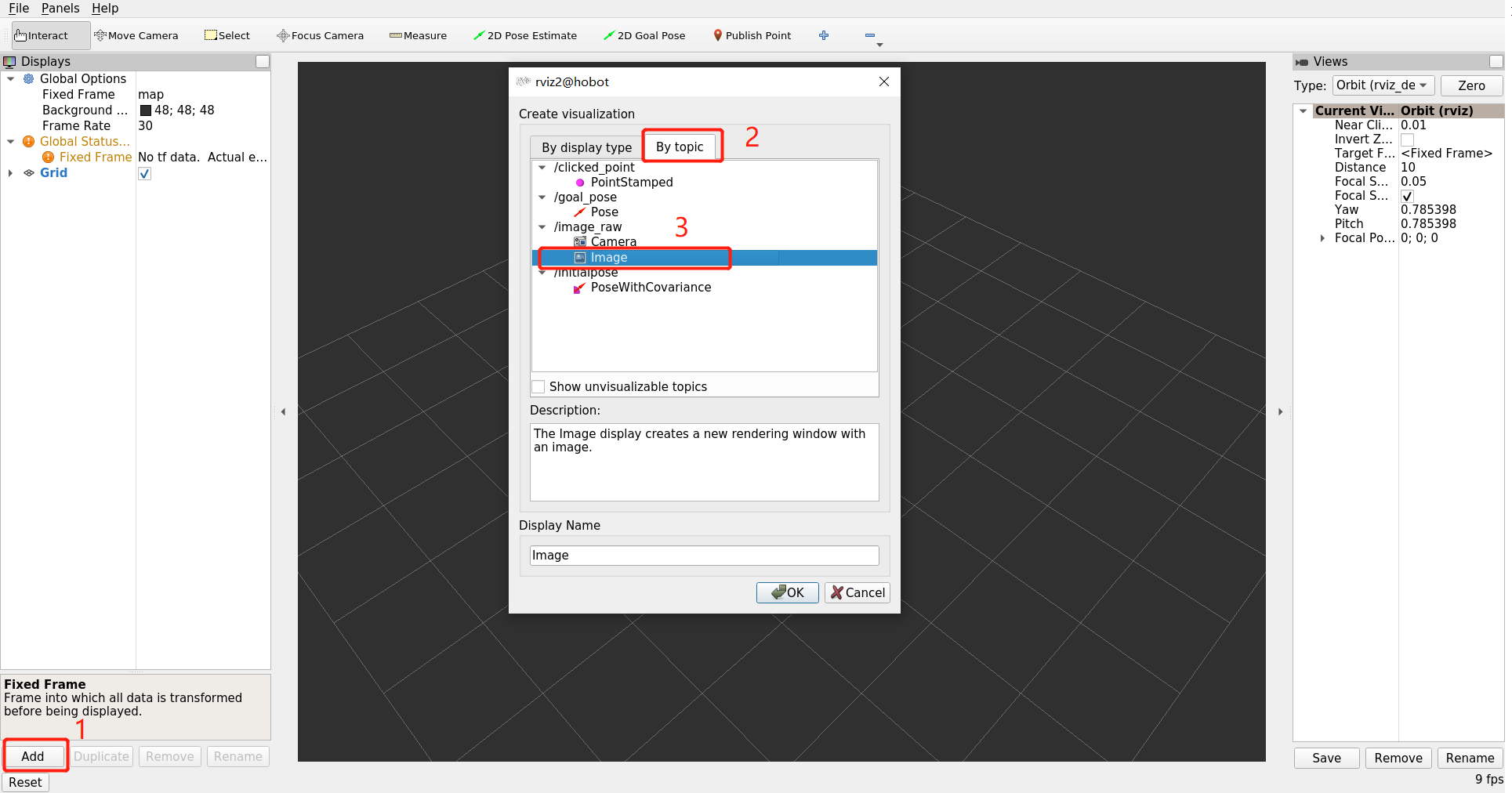
在 RViz2 界面上首先点击 add 按钮,然后按照topic选择发布的图像,在该示例中topic名为/image_raw,然后点击image:
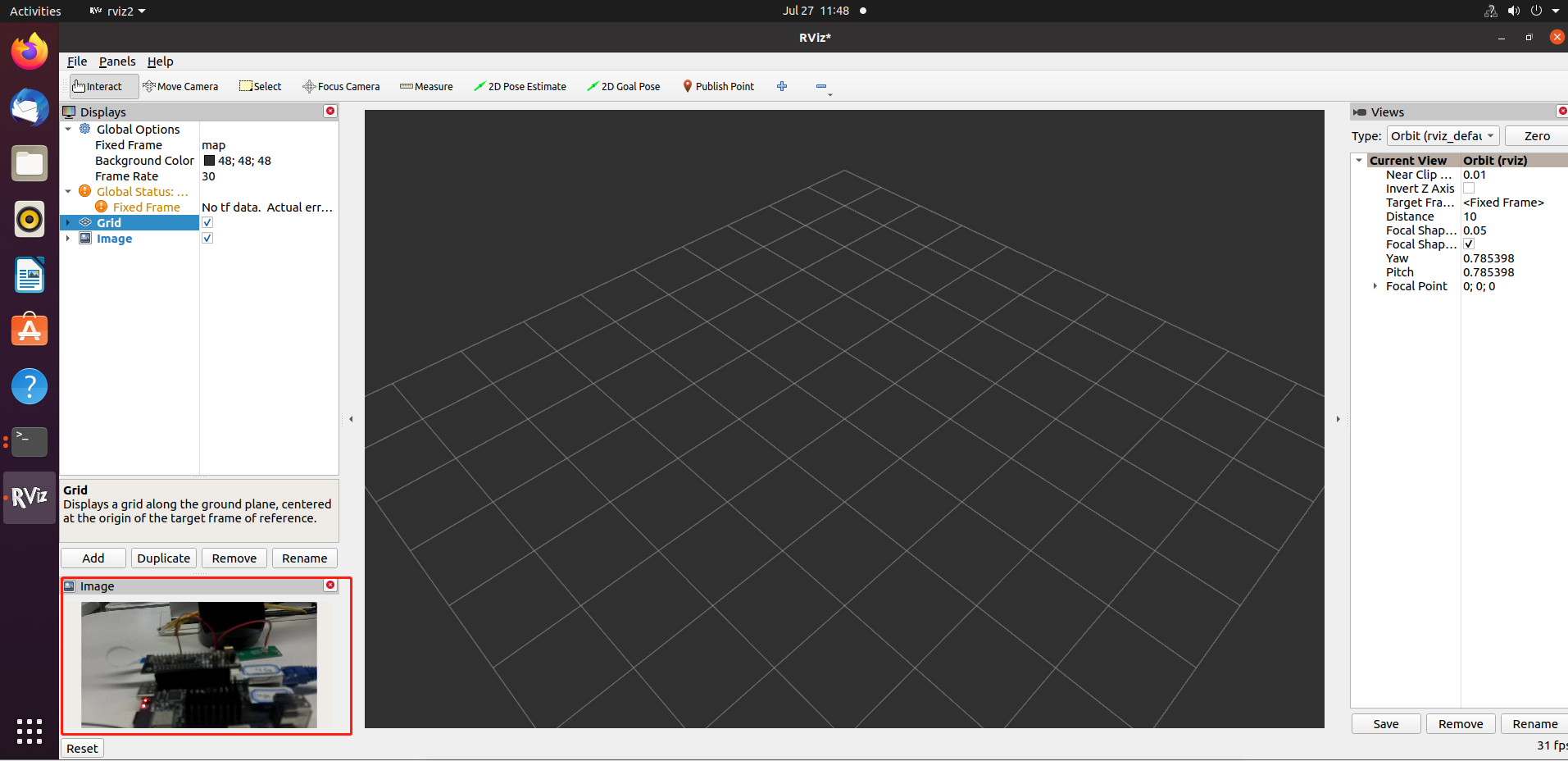
图像效果图如下:
注意事项
如遇到PC端ros2 topic list未识别到摄像头topic,排查:
检查X3派是否正常pub图像
source /opt/tros/setup.bash ros2 topic list输出:
/image_raw /parameter_events /rosout
检查PC和旭日X3派网络能否ping通;
PC和旭日X3派IP地址是否前三位相同;