模型推理开发
功能背景
hobot_dnn是TogetheROS.Bot软件栈中的板端算法推理框架,在地平线旭日X3派上利用BPU处理器实现算法推理功能,基于地平线算法推理框架和ROS2 Node进行二次开发,为机器人应用开发提供更简单易用的模型集成开发接口,包括模型管理、基于模型描述的输入处理及结果解析,以及模型输出内存分配管理等功能。
通过阅读本章节,用户可以使用地平线提供的模型,在旭日X3派上基于hobot_dnn创建并运行一个人体检测的算法Node。借助tros.b提供的组件,订阅摄像头采集&发布的图像,对图像进行算法推理检测出人体框后,使用多目标跟踪(multi-target tracking,即MOT)算法对检测框进行跟踪和目标编号分配,最终实现在PC端的Web浏览器上实时渲染展示图像、人体框检测和目标跟踪结果。
前置条件
1 旭日X3派开发板,并且已安装好相关软件,包括:
地平线提供的Ubuntu 20.04系统镜像。
tros.b软件包。
ROS2软件包构建系统ament_cmake。安装命令:
apt update; apt-get install python3-catkin-pkg; pip3 install empyROS2编译工具colcon。安装命令:
pip3 install -U colcon-common-extensions
2 旭日X3派已安装F37或者GC4663摄像头。
3 可以通过网络访问旭日X3派的PC。
关于hobot_dnn的详细使用说明可以参考hobot_dnn代码中的README.md和接口说明文档。hobot_dnn的使用逻辑流程如下:
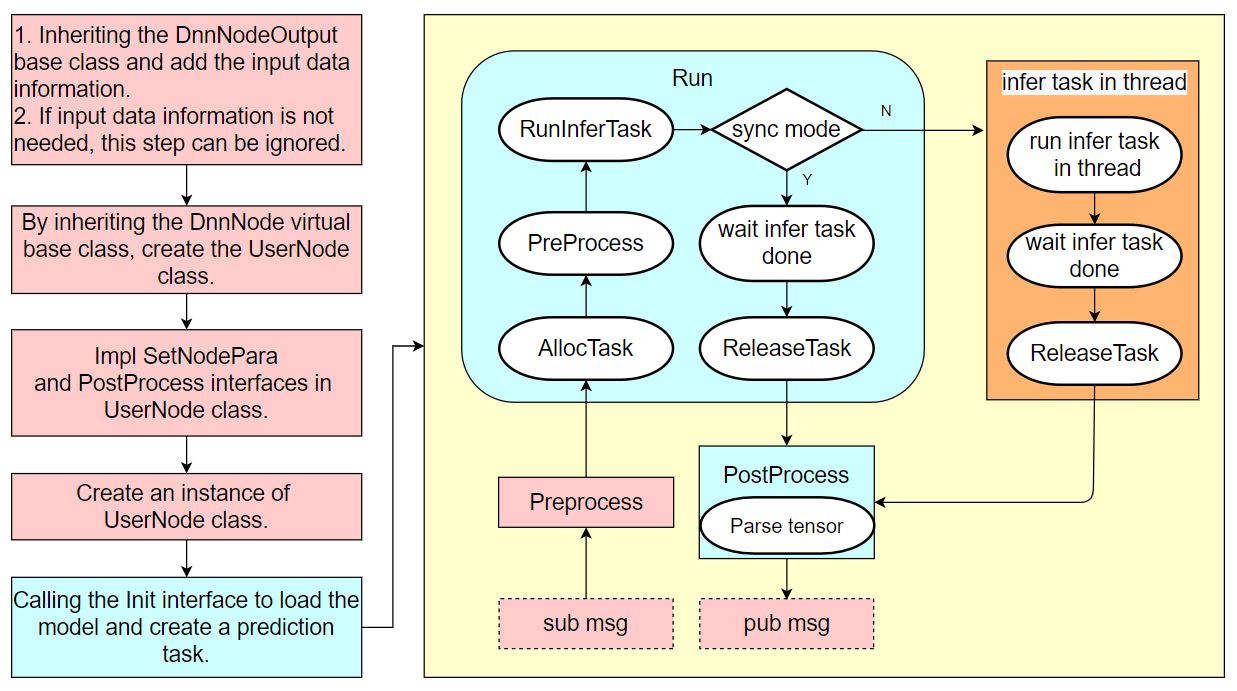
在不了解hobot_dnn使用流程的情况下,用户也可以按照本章节流程使用hobot_dnn开发出模型推理示例。
任务内容
1 创建package
mkdir -p ~/dev_ws/src
cd ~/dev_ws/src
source /opt/tros/setup.bash
ros2 pkg create --build-type ament_cmake cpp_dnn_demo --dependencies rclcpp sensor_msgs hbm_img_msgs ai_msgs dnn_node hobot_mot
cd cpp_dnn_demo
touch src/body_det_demo.cpp
2 编写示例
查看创建后的工程路径如下:
root@ubuntu:~# cd ~
root@ubuntu:~# tree dev_ws/
dev_ws/
└── src
└── cpp_dnn_demo
├── CMakeLists.txt
├── include
│ └── cpp_dnn_demo
├── package.xml
└── src
└── body_det_demo.cpp
5 directories, 3 files
在旭日X3派上使用vi/vim等工具打开创建的代码源文件body_det_demo.cpp:vi ~/dev_ws/src/cpp_dnn_demo/src/body_det_demo.cpp
拷贝如下代码到文件中:
#include "dnn_node/dnn_node.h"
#include "dnn_node/util/image_proc.h"
#include "dnn_node/util/output_parser/detection/fasterrcnn_output_parser.h"
#include "sensor_msgs/msg/image.hpp"
#include "ai_msgs/msg/perception_targets.hpp"
#include "hbm_img_msgs/msg/hbm_msg1080_p.hpp"
#include "hobot_mot/hobot_mot.h"
// 创建算法推理输出数据结构,添加消息头信息成员
struct FasterRcnnOutput : public hobot::dnn_node::DnnNodeOutput {
std::shared_ptr<std_msgs::msg::Header> image_msg_header = nullptr;
};
// 继承DnnNode虚基类,创建算法推理节点
class BodyDetNode : public hobot::dnn_node::DnnNode {
public:
BodyDetNode(const std::string &node_name = "body_det",
const rclcpp::NodeOptions &options = rclcpp::NodeOptions());
protected:
// 实现基类的纯虚接口,用于配置Node参数
int SetNodePara() override;
// 实现基类的虚接口,将解析后的模型输出数据封装成ROS Msg后发布
int PostProcess(const std::shared_ptr<hobot::dnn_node::DnnNodeOutput> &node_output)
override;
private:
// 算法模型输入图片数据的宽和高
int model_input_width_ = -1;
int model_input_height_ = -1;
// 人体检测框结果对应的模型输出索引
const int32_t box_output_index_ = 1;
// 检测框输出索引集合
const std::vector<int32_t> box_outputs_index_ = {box_output_index_};
// 图片消息订阅者
rclcpp::SubscriptionHbmem<hbm_img_msgs::msg::HbmMsg1080P>::ConstSharedPtr
ros_img_subscription_ = nullptr;
// 算法推理结果消息发布者
rclcpp::Publisher<ai_msgs::msg::PerceptionTargets>::SharedPtr
msg_publisher_ = nullptr;
// 多目标跟踪算法引擎
std::shared_ptr<HobotMot> hobot_mot_ = nullptr;
// 图片消息订阅回调
void FeedImg(const hbm_img_msgs::msg::HbmMsg1080P::ConstSharedPtr msg);
};
BodyDetNode::BodyDetNode(const std::string & node_name, const rclcpp::NodeOptions & options) :
hobot::dnn_node::DnnNode(node_name, options) {
// Init中使用BodyDetNode子类实现的SetNodePara()方法进行算法推理的初始化
if (Init() != 0 ||
GetModelInputSize(0, model_input_width_, model_input_height_) < 0) {
RCLCPP_ERROR(rclcpp::get_logger("dnn_demo"), "Node init fail!");
rclcpp::shutdown();
}
// 创建消息订阅者,从摄像头节点订阅图像消息
ros_img_subscription_ =
this->create_subscription_hbmem<hbm_img_msgs::msg::HbmMsg1080P>(
"/hbmem_img", 10, std::bind(&BodyDetNode::FeedImg, this, std::placeholders::_1));
// 创建消息发布者,发布算法推理消息
msg_publisher_ = this->create_publisher<ai_msgs::msg::PerceptionTargets>(
"/cpp_dnn_demo", 10);
// 创建多目标跟踪(MOT)算法引擎
hobot_mot_ = std::make_shared<HobotMot>("config/iou2_method_param.json");
}
int BodyDetNode::SetNodePara() {
if (!dnn_node_para_ptr_) return -1;
// 指定算法推理使用的模型文件路径和模型名
dnn_node_para_ptr_->model_file = "config/multitask_body_kps_960x544.hbm";
dnn_node_para_ptr_->model_name = "multitask_body_kps_960x544";
return 0;
}
void BodyDetNode::FeedImg(const hbm_img_msgs::msg::HbmMsg1080P::ConstSharedPtr img_msg) {
if (!rclcpp::ok()) {
return;
}
// 对订阅到的图片消息进行验证,本示例只支持处理NV12格式图片数据
if (!img_msg) return;
if ("nv12" != std::string(reinterpret_cast<const char*>(img_msg->encoding.data()))) {
RCLCPP_ERROR(rclcpp::get_logger("dnn_demo"), "Only support nv12 img encoding!");
return;
}
// 根据模型输入图片分辨率,使用DnnNode中提供的方法创建模型输入数据
auto inputs = std::vector<std::shared_ptr<hobot::dnn_node::DNNInput>>{
hobot::dnn_node::ImageProc::GetNV12PyramidFromNV12Img(
reinterpret_cast<const char*>(img_msg->data.data()),
img_msg->height, img_msg->width, model_input_height_, model_input_width_)};
// 创建模型输出数据,填充消息头信息
auto dnn_output = std::make_shared<FasterRcnnOutput>();
dnn_output->image_msg_header = std::make_shared<std_msgs::msg::Header>();
dnn_output->image_msg_header->set__frame_id(std::to_string(img_msg->index));
dnn_output->image_msg_header->set__stamp(img_msg->time_stamp);
// 以异步模式运行推理
Run(inputs, dnn_output, nullptr, false);
}
int BodyDetNode::PostProcess(const std::shared_ptr<hobot::dnn_node::DnnNodeOutput> &node_output) {
if (!rclcpp::ok()) {
return 0;
}
// 验证输出数据的有效性
if (node_output->outputs.empty() ||
static_cast<int32_t>(node_output->outputs.size()) < box_output_index_) {
RCLCPP_ERROR(rclcpp::get_logger("dnn_demo"), "Invalid outputs");
return -1;
}
// 创建解析输出数据
// 检测框results的维度等于检测出来的目标类别数
std::vector<std::shared_ptr<hobot::dnn_node::parser_fasterrcnn::Filter2DResult>>
results;
// 关键点数据
std::shared_ptr<hobot::dnn_node::parser_fasterrcnn::LandmarksResult> output_body_kps = nullptr;
// 使用hobot dnn内置的Parse解析方法,解析算法输出
if (hobot::dnn_node::parser_fasterrcnn::Parse(node_output, nullptr,
box_outputs_index_, -1, -1, results, output_body_kps) < 0) {
RCLCPP_ERROR(rclcpp::get_logger("dnn_node_sample"),
"Parse node_output fail!");
return -1;
}
auto filter2d_result = results.at(box_output_index_);
if (!filter2d_result) return -1;
// 将算法推理输出的人体检测框转成MOT算法输入数据类型
std::vector<MotBox> in_box_list;
for (auto& rect : filter2d_result->boxes) {
in_box_list.emplace_back(
MotBox(rect.left, rect.top, rect.right, rect.bottom, rect.conf));
}
// 根据消息头计算当前帧的时间戳
auto fasterRcnn_output =
std::dynamic_pointer_cast<FasterRcnnOutput>(node_output);
time_t time_stamp =
fasterRcnn_output->image_msg_header->stamp.sec * 1000 +
fasterRcnn_output->image_msg_header->stamp.nanosec / 1000 / 1000;
// 创建MOT算法的输出:带有目标编号的人体检测框和消失的目标编号
std::vector<MotBox> out_box_list;
std::vector<std::shared_ptr<MotTrackId>> disappeared_ids;
// 运行多目标跟踪算法
if (hobot_mot_->DoProcess(in_box_list,
out_box_list,
disappeared_ids,
time_stamp,
model_input_width_,
model_input_height_) < 0) {
RCLCPP_ERROR(rclcpp::get_logger("dnn_demo"), "Do mot fail");
return -1;
}
// 创建用于发布推理结果的ROS Msg
ai_msgs::msg::PerceptionTargets::UniquePtr pub_data(
new ai_msgs::msg::PerceptionTargets());
// 将消息头填充到ROS Msg
pub_data->header.set__stamp(fasterRcnn_output->image_msg_header->stamp);
pub_data->header.set__frame_id(fasterRcnn_output->image_msg_header->frame_id);
// 将算法推理输出帧率填充到ROS Msg
if (node_output->rt_stat) {
pub_data->set__fps(round(node_output->rt_stat->output_fps));
// 如果算法推理统计有更新,输出算法模型输入和输出的帧率统计
if (node_output->rt_stat->fps_updated) {
RCLCPP_WARN(rclcpp::get_logger("dnn_demo"),
"input fps: %.2f, out fps: %.2f",
node_output->rt_stat->input_fps,
node_output->rt_stat->output_fps);
}
}
for (auto& rect : out_box_list) {
// 验证目标跟踪结果的有效性
if (rect.id < 0) {
continue;
}
// 将目标跟踪结果和检测框填充到ROS Msg
ai_msgs::msg::Target target;
target.set__type("person");
target.set__track_id(rect.id);
ai_msgs::msg::Roi roi;
roi.type = "body";
roi.rect.set__x_offset(rect.x1);
roi.rect.set__y_offset(rect.y1);
roi.rect.set__width(rect.x2 - rect.x1);
roi.rect.set__height(rect.y2 - rect.y1);
target.rois.emplace_back(roi);
pub_data->targets.emplace_back(std::move(target));
}
// 将消失的目标填充到ROS Msg
for (const auto& id_info : disappeared_ids) {
if (id_info->value < 0 ||
hobot_mot::DataState::INVALID == id_info->state_) {
continue;
}
ai_msgs::msg::Target target;
target.set__type("person");
target.set__track_id(id_info->value);
ai_msgs::msg::Roi roi;
roi.type = "body";
target.rois.emplace_back(roi);
pub_data->disappeared_targets.emplace_back(std::move(target));
}
// 发布ROS Msg
msg_publisher_->publish(std::move(pub_data));
return 0;
}
int main(int argc, char** argv) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<BodyDetNode>());
rclcpp::shutdown();
return 0;
}
2.1 Node设计
示例的人体检测算法Node主要包含三部分逻辑独立的功能。
(1)Node初始化和启动
配置算法使用的模型信息,创建算法推理消息的发布者和图像消息的订阅者,启动目标跟踪算法引擎。
(2)订阅消息和算法推理
在创建图像消息订阅者时,注册了消息回调FeedImg,实现图像数据的处理并用于算法模型推理,回调中不等待算法推理完成。
(3)推理结果的处理和发布
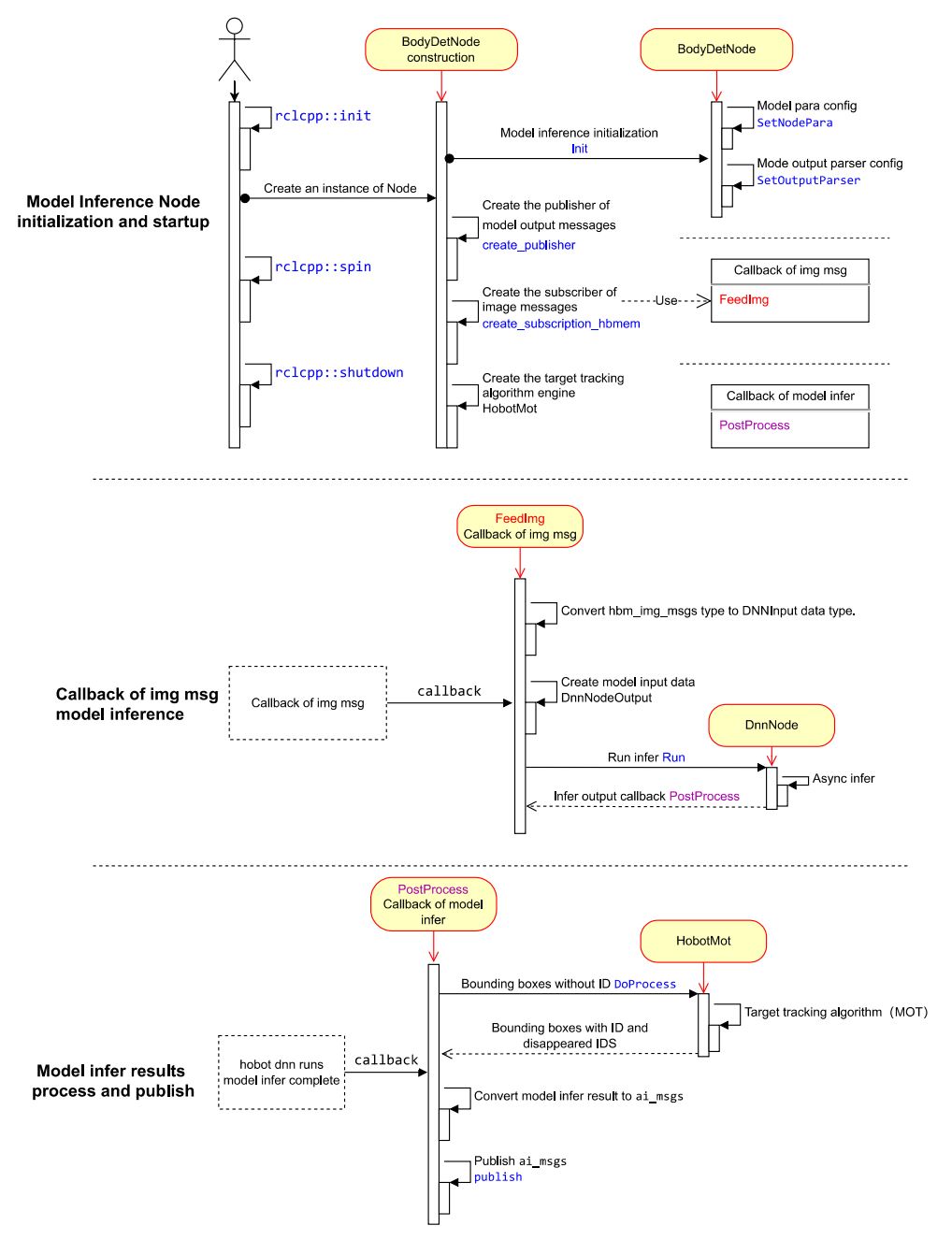
算法推理完成后,通过注册的回调PostProcess输出推理结果,回调中对检测结果进行多目标跟踪算法(HobotMot)处理后,发布算法推理结果消息。
Node的设计和流程逻辑如下图:
2.2 代码说明
添加头文件
推理框架头文件dnn_node/dnn_node.h,用于算法模型管理和推理。
算法模型输入处理头文件dnn_node/util/image_proc.h,用于算法模型输入图片处理。
算法模型输出解析方法头文件dnn_node/util/output_parser/detection/fasterrcnn_output_parser.h,用于模型推理完成后,从输出地址解析出结构化数据(对于本示例使用的人体检测算法,对应的结构化数据为人体检测框)。
ROS Msg头文件,用于消息的订阅和发布。
MOT算法引擎头文件,用于对检测出的人体框进行目标跟踪。
#include "dnn_node/dnn_node.h"
#include "dnn_node/util/image_proc.h"
#include "dnn_node/util/output_parser/detection/fasterrcnn_output_parser.h"
#include "sensor_msgs/msg/image.hpp"
#include "ai_msgs/msg/perception_targets.hpp"
#include "hbm_img_msgs/msg/hbm_msg1080_p.hpp"
#include "hobot_mot/hobot_mot.h"
创建算法推理输出数据结构
继承hobot_dnn中的DnnNodeOutput基类,添加消息头信息成员,用于表示推理输出对应的图片信息。
struct FasterRcnnOutput : public hobot::dnn_node::DnnNodeOutput {
std::shared_ptr<std_msgs::msg::Header> image_msg_header = nullptr;
};
创建算法推理Node
继承hobot_dnn中的DnnNode虚基类,定义算法推理节点BodyDetNode,实现DnnNode中定义的虚接口。
int SetNodePara():配置模型参数。
int PostProcess(const std::shared_ptr<hobot::dnn_node::DnnNodeOutput> &node_output):推理结果回调,将解析后结构化的模型输出数据封装成ROS Msg后发布。
class BodyDetNode : public hobot::dnn_node::DnnNode {
public:
BodyDetNode(const std::string &node_name = "body_det",
const rclcpp::NodeOptions &options = rclcpp::NodeOptions());
protected:
int SetNodePara() override;
int PostProcess(const std::shared_ptr<hobot::dnn_node::DnnNodeOutput> &node_output)
override;
实现BodyDetNode子类的构造
BodyDetNode子类的构造函数中进行Node的初始化,同时通过GetModelInputSize接口获取了模型输入图片的尺寸,包括图片的宽model_input_width_和高model_input_height_,用于模型前处理,不同的模型一般输入图片的尺寸不同。
通过零拷贝的通信方式,创建图片消息的订阅者,从摄像头节点订阅图像消息,用于算法模型推理。订阅的topic为/hbmem_img,消息类型为tros.b中定义的图片消息类型hbm_img_msgs::msg::HbmMsg1080P。
创建消息发布者,用于发布算法推理消息。发布的topic为/cpp_dnn_demo,消息类型为tros.b中定义的算法消息类型ai_msgs::msg::PerceptionTargets。
创建多目标跟踪(MOT)算法引擎,用于对每个人体检测框进行目标跟踪。
BodyDetNode构造函数实现:
BodyDetNode::BodyDetNode(const std::string & node_name, const rclcpp::NodeOptions & options) :
hobot::dnn_node::DnnNode(node_name, options) {
// Init中使用BodyDetNode子类实现的SetNodePara()方法进行算法推理的初始化
if (Init() != 0 ||
GetModelInputSize(0, model_input_width_, model_input_height_) < 0) {
RCLCPP_ERROR(rclcpp::get_logger("dnn_demo"), "Node init fail!");
rclcpp::shutdown();
}
// 创建消息订阅者,从摄像头节点订阅图像消息
ros_img_subscription_ =
this->create_subscription_hbmem<hbm_img_msgs::msg::HbmMsg1080P>(
"/hbmem_img", 10, std::bind(&BodyDetNode::FeedImg, this, std::placeholders::_1));
// 创建消息发布者,发布算法推理消息
msg_publisher_ = this->create_publisher<ai_msgs::msg::PerceptionTargets>(
"/cpp_dnn_demo", 10);
// 创建多目标跟踪(MOT)算法引擎
hobot_mot_ = std::make_shared<HobotMot>("config/iou2_method_param.json");
}
其中Init()是DnnNode基类中定义并实现的接口,执行算法推理初始化,只做pipeline的串联,具体的SetNodePara()步骤由用户(子类中)实现。串联的初始化流程如下:
int DnnNode::Init() {
RCLCPP_INFO(rclcpp::get_logger("dnn"), "Node init.");
int ret = 0;
// 1. set model info in node para
ret = SetNodePara();
if (ret != 0) {
RCLCPP_ERROR(rclcpp::get_logger("dnn"), "Set node para failed!");
return ret;
}
// check node para
if (ModelTaskType::InvalidType == dnn_node_para_ptr_->model_task_type) {
RCLCPP_ERROR(rclcpp::get_logger("dnn"), "Invalid model task type");
return -1;
}
// 2. model init
ret = dnn_node_impl_->ModelInit();
if (ret != 0) {
RCLCPP_ERROR(rclcpp::get_logger("dnn"), "Model init failed!");
return ret;
}
// 3. set output parser
ret = SetOutputParser();
if (ret != 0) {
RCLCPP_ERROR(rclcpp::get_logger("dnn"), "Set output parser failed!");
return ret;
}
// 4. task init
ret = dnn_node_impl_->TaskInit();
if (ret != 0) {
RCLCPP_ERROR(rclcpp::get_logger("dnn"), "Task init failed!");
return ret;
}
return ret;
}
配置模型参数
配置算法推理使用的模型文件路径和模型名。
int BodyDetNode::SetNodePara() {
if (!dnn_node_para_ptr_) return -1;
dnn_node_para_ptr_->model_file = "config/multitask_body_kps_960x544.hbm";
dnn_node_para_ptr_->model_name = "multitask_body_kps_960x544";
return 0;
}
实现图片订阅结果回调
创建DNNInput类型的模型输入数据。订阅到的消息中包含图片信息(图片的编码方式、内容数据和分辨率等信息),使用hobot_dnn中的算法模型输入图片处理接口hobot::dnn_node::ImageProc::GetNV12PyramidFromNV12Img,将订阅到的nv12格式的图片按照模型输入分辨率(model_input_width_和model_input_height_,在BodyDetNode的构造函数中通过GetModelInputSize接口从加载的模型中查询得到)转成模型输入的数据类型。接口定义如下:
// - [in] in_img_data 图片数据
// - [in] in_img_height 图片的高度
// - [in] in_img_width 图片的宽度
// - [in] scaled_img_height 模型输入的高度
// - [in] scaled_img_width 模型输入的宽度
std::shared_ptr<NV12PyramidInput> GetNV12PyramidFromNV12Img(
const char* in_img_data,
const int& in_img_height,
const int& in_img_width,
const int& scaled_img_height,
const int& scaled_img_width);
创建FasterRcnnOutput类型的模型输出数据。订阅到的消息中包含消息头(frame_id和时间戳),使用订阅到的消息头填充输出数据的消息头,用于表述算法推理输出对应的图片信息。
启动推理。使用DnnNode基类中的Run接口以异步模式运行推理,接口的第四个参数为false表示使用效率更高的异步推理模式。Run接口定义如下:
// - 参数
// - [in] inputs 输入数据智能指针列表
// - [in] outputs 输出数据智能指针
// - [in] rois 抠图roi数据,只对ModelRoiInferType模型有效
// - [in] is_sync_mode 预测模式,true为同步模式,false为异步模式
// - [in] alloctask_timeout_ms 申请推理任务超时时间,单位毫秒
// 默认一直等待直到申请成功
// - [in] infer_timeout_ms 推理超时时间,单位毫秒,默认1000毫秒推理超时
int Run(std::vector<std::shared_ptr<DNNInput>> &inputs,
const std::shared_ptr<DnnNodeOutput> &output = nullptr,
const std::shared_ptr<std::vector<hbDNNRoi>> rois = nullptr,
const bool is_sync_mode = true,
const int alloctask_timeout_ms = -1,
const int infer_timeout_ms = 1000);
完整的图片订阅结果回调FeedImg实现如下:
void BodyDetNode::FeedImg(const hbm_img_msgs::msg::HbmMsg1080P::ConstSharedPtr img_msg) {
if (!rclcpp::ok()) {
return;
}
// 对订阅到的图片消息进行验证,本示例只支持处理NV12格式图片数据
if (!img_msg) return;
if ("nv12" != std::string(reinterpret_cast<const char*>(img_msg->encoding.data()))) {
RCLCPP_ERROR(rclcpp::get_logger("dnn_demo"), "Only support nv12 img encoding!");
return;
}
// 根据模型输入图片分辨率,使用hobot_dnn中提供的方法创建模型输入数据
auto inputs = std::vector<std::shared_ptr<hobot::dnn_node::DNNInput>>{
hobot::dnn_node::ImageProc::GetNV12PyramidFromNV12Img(
reinterpret_cast<const char*>(img_msg->data.data()),
img_msg->height, img_msg->width, model_input_height_, model_input_width_)};
// 创建模型输出数据,填充消息头信息
auto dnn_output = std::make_shared<FasterRcnnOutput>();
dnn_output->image_msg_header = std::make_shared<std_msgs::msg::Header>();
dnn_output->image_msg_header->set__frame_id(std::to_string(img_msg->index));
dnn_output->image_msg_header->set__stamp(img_msg->time_stamp);
// 以异步模式运行推理
Run(inputs, dnn_output, nullptr, false);
}
实现推理结果回调
算法推理结果回调是将解析后结构化的模型输出数据经过MOT算法处理后,输出带有目标编号的人体检测框和消失的目标编号数据,封装成ROS Msg后发布。
创建Filter2DResult类型的结构化推理结果数据。
使用hobot dnn内置的Parse解析方法,解析人体检测算法输出。
运行多目标跟踪算法。将算法推理输出的人体检测框转成MOT算法输入数据类型,并根据消息头计算当前帧的时间戳,经过MOT算法处理后得到带有目标编号的人体检测框和消失的目标编号。
发布算法推理结果。创建ROS Msg,填充算法推理结果对应的图片消息头(帧ID和时间戳),带有目标编号的人体检测框,算法推理输出的帧率统计,消失的目标编号。发布的ROS Msg可以被其他ROS Node订阅和使用。
int BodyDetNode::PostProcess(const std::shared_ptr<hobot::dnn_node::DnnNodeOutput> &node_output) {
if (!rclcpp::ok()) {
return 0;
}
// 验证输出数据的有效性
if (node_output->outputs.empty() ||
static_cast<int32_t>(node_output->outputs.size()) < box_output_index_) {
RCLCPP_ERROR(rclcpp::get_logger("dnn_demo"), "Invalid outputs");
return -1;
}
// 创建解析输出数据
// 检测框results的维度等于检测出来的目标类别数
std::vector<std::shared_ptr<hobot::dnn_node::parser_fasterrcnn::Filter2DResult>>
results;
// 关键点数据
std::shared_ptr<hobot::dnn_node::parser_fasterrcnn::LandmarksResult> output_body_kps = nullptr;
// 使用hobot dnn内置的Parse解析方法,解析算法输出
if (hobot::dnn_node::parser_fasterrcnn::Parse(node_output, nullptr,
box_outputs_index_, -1, -1, results, output_body_kps) < 0) {
RCLCPP_ERROR(rclcpp::get_logger("dnn_node_sample"),
"Parse node_output fail!");
return -1;
}
auto filter2d_result = results.at(box_output_index_);
if (!filter2d_result) return -1;
// 将算法推理输出的人体检测框转成MOT算法输入数据类型
std::vector<MotBox> in_box_list;
for (auto& rect : filter2d_result->boxes) {
in_box_list.emplace_back(
MotBox(rect.left, rect.top, rect.right, rect.bottom, rect.conf));
}
// 根据消息头计算当前帧的时间戳
auto fasterRcnn_output =
std::dynamic_pointer_cast<FasterRcnnOutput>(node_output);
time_t time_stamp =
fasterRcnn_output->image_msg_header->stamp.sec * 1000 +
fasterRcnn_output->image_msg_header->stamp.nanosec / 1000 / 1000;
// 创建MOT算法的输出:带有目标编号的人体检测框和消失的目标编号
std::vector<MotBox> out_box_list;
std::vector<std::shared_ptr<MotTrackId>> disappeared_ids;
// 运行多目标跟踪算法
if (hobot_mot_->DoProcess(in_box_list,
out_box_list,
disappeared_ids,
time_stamp,
model_input_width_,
model_input_height_) < 0) {
RCLCPP_ERROR(rclcpp::get_logger("dnn_demo"), "Do mot fail");
return -1;
}
// 创建用于发布推理结果的ROS Msg
ai_msgs::msg::PerceptionTargets::UniquePtr pub_data(
new ai_msgs::msg::PerceptionTargets());
// 将消息头填充到ROS Msg
pub_data->header.set__stamp(fasterRcnn_output->image_msg_header->stamp);
pub_data->header.set__frame_id(fasterRcnn_output->image_msg_header->frame_id);
// 将算法推理输出帧率填充到ROS Msg
if (node_output->rt_stat) {
pub_data->set__fps(round(node_output->rt_stat->output_fps));
// 如果算法推理统计有更新,输出算法模型输入和输出的帧率统计
if (node_output->rt_stat->fps_updated) {
RCLCPP_WARN(rclcpp::get_logger("dnn_demo"),
"input fps: %.2f, out fps: %.2f",
node_output->rt_stat->input_fps,
node_output->rt_stat->output_fps);
}
}
for (auto& rect : out_box_list) {
// 验证目标跟踪结果的有效性
if (rect.id < 0) {
continue;
}
// 将目标跟踪结果和检测框填充到ROS Msg
ai_msgs::msg::Target target;
target.set__type("person");
target.set__track_id(rect.id);
ai_msgs::msg::Roi roi;
roi.type = "body";
roi.rect.set__x_offset(rect.x1);
roi.rect.set__y_offset(rect.y1);
roi.rect.set__width(rect.x2 - rect.x1);
roi.rect.set__height(rect.y2 - rect.y1);
target.rois.emplace_back(roi);
pub_data->targets.emplace_back(std::move(target));
}
// 将消失的目标填充到ROS Msg
for (const auto& id_info : disappeared_ids) {
if (id_info->value < 0 ||
hobot_mot::DataState::INVALID == id_info->state_) {
continue;
}
ai_msgs::msg::Target target;
target.set__type("person");
target.set__track_id(id_info->value);
ai_msgs::msg::Roi roi;
roi.type = "body";
target.rois.emplace_back(roi);
pub_data->disappeared_targets.emplace_back(std::move(target));
}
// 发布ROS Msg
msg_publisher_->publish(std::move(pub_data));
return 0;
}
dnn node中内置了多种检测、分类和分割算法的模型输出解析方法,X3派上安装TROS后查询支持的解析方法如下:
root@ubuntu:~# tree /opt/tros/include/dnn_node/util/output_parser
/opt/tros/include/dnn_node/util/output_parser
├── classification
│ └── ptq_classification_output_parser.h
├── detection
│ ├── fasterrcnn_output_parser.h
│ ├── fcos_output_parser.h
│ ├── nms.h
│ ├── ptq_efficientdet_output_parser.h
│ ├── ptq_ssd_output_parser.h
│ ├── ptq_yolo2_output_parser.h
│ ├── ptq_yolo3_darknet_output_parser.h
│ └── ptq_yolo5_output_parser.h
├── perception_common.h
├── segmentation
│ └── ptq_unet_output_parser.h
└── utils.h
3 directories, 12 files
可以看到/opt/tros/include/dnn_node/util/output_parser路径下有classification、detection和segmentation三个路径,分别对应分类、检测和分割算法的模型输出解析方法。
perception_common.h为定义的解析后的感知结果数据类型。
算法模型和对应的输出解析方法如下:
| 算法类别 | 算法 | 算法输出解析方法 |
|---|---|---|
| 目标检测 | FCOS | fcos_output_parser.h |
| 目标检测 | EfficientNet_Det | ptq_efficientdet_output_parser.h |
| 目标检测 | MobileNet_SSD | ptq_ssd_output_parser.h |
| 目标检测 | YoloV2 | ptq_yolo2_output_parser.h |
| 目标检测 | YoloV3 | ptq_yolo3_darknet_output_parser.h |
| 目标检测 | YoloV5 | ptq_yolo5_output_parser.h |
| 人体检测 | FasterRcnn | fasterrcnn_output_parser.h |
| 图片分类 | mobilenetv2 | ptq_classification_output_parser.h |
| 语义分割 | mobilenet_unet | ptq_unet_output_parser.h |
入口函数
创建BodyDetNode的实例,在BodyDetNode的构造中初始化和启动推理任务,直到用户输入退出信号才停止推理。
int main(int argc, char** argv) {
rclcpp::init(argc, argv);
rclcpp::spin(std::make_shared<BodyDetNode>());
rclcpp::shutdown();
return 0;
}
2.3 编译依赖
步骤1的创建package中通过ros2 pkg create命令创建了cpp_dnn_demo package,在dev_ws/src/cpp_dnn_demo路径下已经自动创建了CMakeLists.txt和package.xml。
在package.xml中自动添加了编译依赖的pkg,涉及到的依赖包括rclcpp、sensor_msgs、ai_msgs、hbm_img_msgs、dnn_node和hobot_mot。其中ai_msgs为TogatherROS中定义的算法输出消息格式,hbm_img_msgs为TogatherROS中定义的用于零拷贝通信方式下使用的图片消息格式,dnn_node为算法推理框架,hobot_mot为多目标跟踪算法。在TogatherROS安装时已安装这些pkg。
2.4 编译脚本
在 CMakeLists.txt 中添加pkg依赖和编译安装信息。
(1)添加多目标跟踪算法和算法推理引擎库依赖
link_directories(
/opt/tros/lib/
/usr/lib/hbbpu/
)
(2)添加pkg编译信息
add_executable(${PROJECT_NAME}
src/body_det_demo.cpp
)
ament_target_dependencies(
${PROJECT_NAME}
rclcpp
dnn_node
sensor_msgs
ai_msgs
hobot_mot
hbm_img_msgs
)
(3)添加pkg安装信息,实现通过ros2 run运行编译出来的pkg
install(
TARGETS ${PROJECT_NAME}
RUNTIME DESTINATION lib/${PROJECT_NAME}
)
完整的CMakeLists.txt如下:
cmake_minimum_required(VERSION 3.5)
project(cpp_dnn_demo)
# Default to C99
if(NOT CMAKE_C_STANDARD)
set(CMAKE_C_STANDARD 99)
endif()
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(sensor_msgs REQUIRED)
find_package(ai_msgs REQUIRED)
find_package(hbm_img_msgs REQUIRED)
find_package(dnn_node REQUIRED)
find_package(hobot_mot REQUIRED)
link_directories(
/opt/tros/lib/
/usr/lib/hbbpu/
)
add_executable(${PROJECT_NAME}
src/body_det_demo.cpp
)
ament_target_dependencies(
${PROJECT_NAME}
rclcpp
dnn_node
sensor_msgs
ai_msgs
hobot_mot
hbm_img_msgs
)
# Install executables
install(
TARGETS ${PROJECT_NAME}
RUNTIME DESTINATION lib/${PROJECT_NAME}
)
ament_package()
3 编译和运行
3.1 编译
在安装了tros.b的旭日X3派上,执行以下命令编译pkg:
cd ~/dev_ws
# 配置tros.b环境
source /opt/tros/setup.bash
# 编译pkg
colcon build --packages-select cpp_dnn_demo
如果编译成功,在编译所在路径下产生cpp_dnn_demo pkg的部署包install,编译终端输出如下信息:
Starting >>> cpp_dnn_demo
[Processing: cpp_dnn_demo]
Finished <<< cpp_dnn_demo [32.7s]
Summary: 1 package finished [33.4s]
3.2 编译常见错误
1、ModuleNotFoundError: No module named ‘ament_package’
具体错误信息如下:
# colcon build --packages-select cpp_dnn_demo
Starting >>> cpp_dnn_demo
--- stderr: cpp_dnn_demo
CMake Error at CMakeLists.txt:19 (find_package):
By not providing "Findament_cmake.cmake" in CMAKE_MODULE_PATH this project
has asked CMake to find a package configuration file provided by
"ament_cmake", but CMake did not find one.
Could not find a package configuration file provided by "ament_cmake" with
any of the following names:
ament_cmakeConfig.cmake
ament_cmake-config.cmake
Add the installation prefix of "ament_cmake" to CMAKE_PREFIX_PATH or set
"ament_cmake_DIR" to a directory containing one of the above files. If
"ament_cmake" provides a separate development package or SDK, be sure it
has been installed.
---
Failed <<< cpp_dnn_demo [2.83s, exited with code 1]
Summary: 0 packages finished [3.44s]
1 package failed: cpp_dnn_demo
1 package had stderr output: cpp_dnn_demo
说明ROS2环境没有配置成功。在终端输入ros2命令进行环境检查:
# ros2
-bash: ros2: command not found
如果提示“command not found”,说明ROS2环境没有配置成功,检查source /opt/tros/setup.bash命令是否执行成功。配置成功的输出信息如下:
# ros2
usage: ros2 [-h] Call `ros2 <command> -h` for more detailed usage. ...
ros2 is an extensible command-line tool for ROS 2.
optional arguments:
-h, --help show this help message and exit
2、查找不到dnn_node package
具体错误信息如下:
colcon build --packages-select cpp_dnn_demo
Starting >>> cpp_dnn_demo
[Processing: cpp_dnn_demo]
--- stderr: cpp_dnn_demo
CMake Error at CMakeLists.txt:22 (find_package):
By not providing "Finddnn_node.cmake" in CMAKE_MODULE_PATH this project has
asked CMake to find a package configuration file provided by "dnn_node",
but CMake did not find one.
Could not find a package configuration file provided by "dnn_node" with any
of the following names:
dnn_nodeConfig.cmake
dnn_node-config.cmake
Add the installation prefix of "dnn_node" to CMAKE_PREFIX_PATH or set
"dnn_node_DIR" to a directory containing one of the above files. If
"dnn_node" provides a separate development package or SDK, be sure it has
been installed.
Failed <<< cpp_dnn_demo [59.7s, exited with code 1]
Summary: 0 packages finished [1min 1s]
1 package failed: cpp_dnn_demo
1 package had stderr output: cpp_dnn_demo
说明hobot_dnn环境没有配置成功,检查/opt/tros/share/dnn_node是否存在。
3.3 运行
为了更好的展示算法推理效果,体验感知能力,使用tros.b中的MIPI摄像头图像采集、图像编码和WEB数据展示Node,提供数据传感和展示的能力,实现在X3派上发布摄像头采集到的图像,对图像进行算法推理检测出人体框后,在PC端的WEB浏览器上实时渲染展示图像和人体框检测结果。
运行时系统流程图如下:
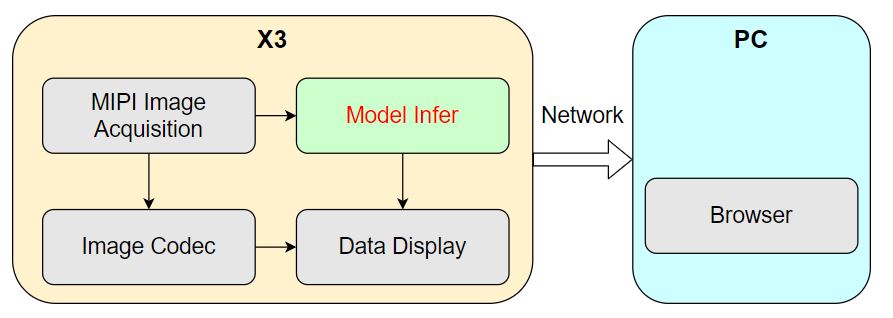
X3派上的运行4个node,其中算法推理为本示例。
系统启动流程如下:
(1)X3派上打开终端1,启动算法推理node
cd ~/dev_ws
# 配置tros.b环境
source /opt/tros/setup.bash
# 配置cpp_dnn_demo环境
source ./install/local_setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
# 模型文件
mkdir -p config && cp /opt/tros/lib/dnn_benchmark_example/config/multitask_body_kps_960x544.hbm config/
# 多目标跟踪配置文件
cp -r /opt/tros/lib/hobot_mot/config/iou2_method_param.json config/
# 运行cpp_dnn_demo pkg
ros2 run cpp_dnn_demo cpp_dnn_demo --ros-args --log-level warn
(2)X3派上打开终端2,启动tros.b中的图像发布、编码和展示Node
由于启动的Node比较多,使用启动脚本通过launch批量启动Node。在X3派的任意路径下创建启动脚本cpp_dnn_demo.launch.py,内容如下:
import os
from launch import LaunchDescription
from launch_ros.actions import Node
from launch.actions import IncludeLaunchDescription
from launch.launch_description_sources import PythonLaunchDescriptionSource
from ament_index_python import get_package_share_directory
from ament_index_python.packages import get_package_prefix
def generate_launch_description():
web_service_launch_include = IncludeLaunchDescription(
PythonLaunchDescriptionSource(
os.path.join(
get_package_share_directory('websocket'),
'launch/hobot_websocket_service.launch.py'))
)
return LaunchDescription([
web_service_launch_include,
# 启动图片发布pkg
Node(
package='mipi_cam',
executable='mipi_cam',
output='screen',
parameters=[
{"out_format": "nv12"},
{"image_width": 960},
{"image_height": 544},
{"io_method": "shared_mem"},
{"video_device": "F37"}
],
arguments=['--ros-args', '--log-level', 'error']
),
# 启动jpeg图片编码&发布pkg
Node(
package='hobot_codec',
executable='hobot_codec_republish',
output='screen',
parameters=[
{"channel": 1},
{"in_mode": "shared_mem"},
{"in_format": "nv12"},
{"out_mode": "ros"},
{"out_format": "jpeg"},
{"sub_topic": "/hbmem_img"},
{"pub_topic": "/image_jpeg"}
],
arguments=['--ros-args', '--log-level', 'error']
),
# 启动web展示pkg
Node(
package='websocket',
executable='websocket',
output='screen',
parameters=[
{"image_topic": "/image_jpeg"},
{"image_type": "mjpeg"},
{"smart_topic": "/cpp_dnn_demo"}
],
arguments=['--ros-args', '--log-level', 'error']
)
])
使用启动脚本:
# 配置tros.b环境
source /opt/tros/setup.bash
# 启动图像发布、编码和展示node
ros2 launch cpp_dnn_demo.launch.py
3.4 运行常见错误
如果启动报如下错误信息:
error while loading shared libraries: libdnn_node.so: cannot open shared object file: No such file or directory
说明配置hobot_dnn环境失败,检查/opt/tros/share/dnn_node是否存在。
3.5 运行结果
运行成功后,启动终端输出如下信息:
root@ubuntu:~/dev_ws# ros2 run cpp_dnn_demo cpp_dnn_demo
[BPU_PLAT]BPU Platform Version(1.3.1)!
[C][154775][10-25][00:33:53:266][configuration.cpp:49][EasyDNN]EasyDNN version: 0.4.11
[HBRT] set log level as 0. version = 3.14.5
[DNN] Runtime version = 1.9.7_(3.14.5 HBRT)
[WARN] [1666629233.325690884] [dnn]: Run default SetOutputParser.
[WARN] [1666629233.326263403] [dnn]: Set output parser with default dnn node parser, you will get all output tensors and should parse output_tensors in PostProcess.
(MOTMethod.cpp:34): MOTMethod::Init config/iou2_method_param.json
(IOU2.cpp:29): IOU2 Mot::Init config/iou2_method_param.json
[WARN] [1666629234.410291616] [dnn_demo]: input fps: 31.22, out fps: 31.28
[WARN] [1666629235.410357068] [dnn_demo]: input fps: 30.00, out fps: 30.00
[WARN] [1666629236.444863458] [dnn_demo]: input fps: 30.01, out fps: 29.98
[WARN] [1666629237.476656118] [dnn_demo]: input fps: 30.00, out fps: 30.07
[WARN] [1666629238.478156431] [dnn_demo]: input fps: 30.01, out fps: 29.97
[WARN] [1666629239.510039629] [dnn_demo]: input fps: 30.01, out fps: 30.07
[WARN] [1666629240.511561150] [dnn_demo]: input fps: 30.00, out fps: 29.97
[WARN] [1666629241.543333811] [dnn_demo]: input fps: 30.01, out fps: 30.07
[WARN] [1666629242.544654089] [dnn_demo]: input fps: 30.01, out fps: 29.97
[WARN] [1666629243.576435625] [dnn_demo]: input fps: 30.01, out fps: 30.07
输出log显示,初始化时算法推理使用的模型输入图片分辨率为960x544,使用一个推理任务,MOT算法引擎使用的配置文件为config/iou2_method_param.json。推理时算法输入和输出帧率为30fps,每秒钟刷新一次统计帧率。
在X3派上使用ros2命令查询并输出推理Node发布的/cpp_dnn_demo话题消息内容:
root@ubuntu:~# source /opt/tros/setup.bash
root@ubuntu:~# ros2 topic list
/cpp_dnn_demo
/hbmem_img08172824022201080202012021072315
/image_jpeg
/parameter_events
/rosout
root@ubuntu:~# ros2 topic echo /cpp_dnn_demo
header:
stamp:
sec: 1659938514
nanosec: 550421888
frame_id: '7623'
fps: 30
perfs: []
targets:
- type: person
track_id: 1
rois:
- type: body
rect:
x_offset: 306
y_offset: 106
height: 416
width: 151
do_rectify: false
attributes: []
points: []
captures: []
- type: person
track_id: 2
rois:
- type: body
rect:
x_offset: 135
y_offset: 89
height: 423
width: 155
do_rectify: false
attributes: []
points: []
captures: []
- type: person
track_id: 3
rois:
- type: body
rect:
x_offset: 569
y_offset: 161
height: 340
width: 123
do_rectify: false
attributes: []
points: []
captures: []
- type: person
track_id: 4
rois:
- type: body
rect:
x_offset: 677
y_offset: 121
height: 398
width: 123
do_rectify: false
attributes: []
points: []
captures: []
- type: person
track_id: 5
rois:
- type: body
rect:
x_offset: 478
y_offset: 163
height: 348
width: 103
do_rectify: false
attributes: []
points: []
captures: []
disappeared_targets: []
---
输出的/cpp_dnn_demo话题消息表明算法检测出5个人体框(rois type为body),并输出了每个检测框的坐标(rect)和对应的目标跟踪结果(track_id)。
在PC端的WEB浏览器上输入http://IP:8000(IP为X3派IP地址,如本示例使用的IP地址为10.64.28.88)查看实时的图片和算法推理渲染效果:

每个检测框上渲染了检测框类型(如body表示是人体检测框)和目标跟踪结果,浏览器左下角的fps字段表示实时的算法推理输出帧率。
输入Ctrl+C命令退出程序。
本节总结
本章节介绍了如何使用地平线提供的模型,基于hobot_dnn创建并运行一个人体检测的算法推理示例。使用从摄像头发布的图片,获取算法输出并在PC端浏览器上实时渲染展示图片和算法推理结果。