图像发布工具
功能介绍
图片发布工具支持批量读取本地图片或视频文件,并按照ROS消息格式发布,从而提高算法调试和部署效率。目前支持JPEG/JPG/PNG/NV12格式的图片,并在读取后将其转换为NV12格式进行发布。对于视频文件,支持H264/H265/MP4格式,读取视频文件后提取相关的视频流进行发布。注意,由于目前X86版本的TogetheROS.Bot hobot_codec还不支持H.264、H.265和NV12之间的转换,因此该功能无法在X86平台展示。
代码仓库:https://c-gitlab.horizon.ai/HHP/tools/hobot_image_publisher.git
支持平台
| 平台 | 运行方式 |
|---|---|
| 旭日X3派 | Ubuntu 20.04 |
| X86 | Ubuntu 20.04 |
准备工作
旭日X3派
旭日X3派已烧录好地平线提供的Ubuntu 20.04系统镜像
旭日X3派已成功安装tros.b
可以通过网络访问旭日X3派的PC
X86平台
X86环境已配置Ubuntu 20.04系统镜像
X86环境已安装X86版本 tros.b
图片发布使用介绍
循环读取本地的一张NV12格式图片并发布,使用图像编解码模块将图片压缩编码成JPEG格式,在PC的Web端展示图片。
旭日X3派
# 配置tros.b环境
source /opt/tros/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的图片文件
cp -r /opt/tros/lib/hobot_image_publisher/config/ .
# 启动launch文件
ros2 launch hobot_image_publisher hobot_image_publisher_demo.launch.py
X86平台
在浏览器上显示发布的图片,确认PC端已经启动用于Web展示的webserver服务(设备启动后只需要启动一次服务,只有设备重启的情况下需要重新启动服务)。可执行ps -aux命令查看是否有nginx进程,如果有,表示已经启动此服务,如果无,启动服务,运行方法为:
# 配置tros.b环境
source /opt/tros/setup.bash
ros2 launch websocket hobot_websocket_service.launch.py
# 配置tros.b环境
source /opt/tros/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的图片文件
cp -r /opt/tros/lib/hobot_image_publisher/config/ .
# 启动launch文件
ros2 launch hobot_image_publisher hobot_image_publisher_demo.launch.py
图片发布结果分析
在运行终端输出如下信息:
[INFO] [launch]: All log files can be found below /root/.ros/log/2022-08-19-12-58-02-288516-ubuntu-24492
[INFO] [launch]: Default logging verbosity is set to INFO
webserver has launch
[INFO] [hobot_image_pub-1]: process started with pid [24511]
[INFO] [hobot_codec_republish-2]: process started with pid [24513]
[INFO] [websocket-3]: process started with pid [24519]
输出log显示出webserver已启动,hobot_image_pub、hobot_codec_republish、websocket都正常运行
在PC端的浏览器输入http://IP:8000 即可查看图像展示效果(IP为旭日X3派/X86设备的IP地址):
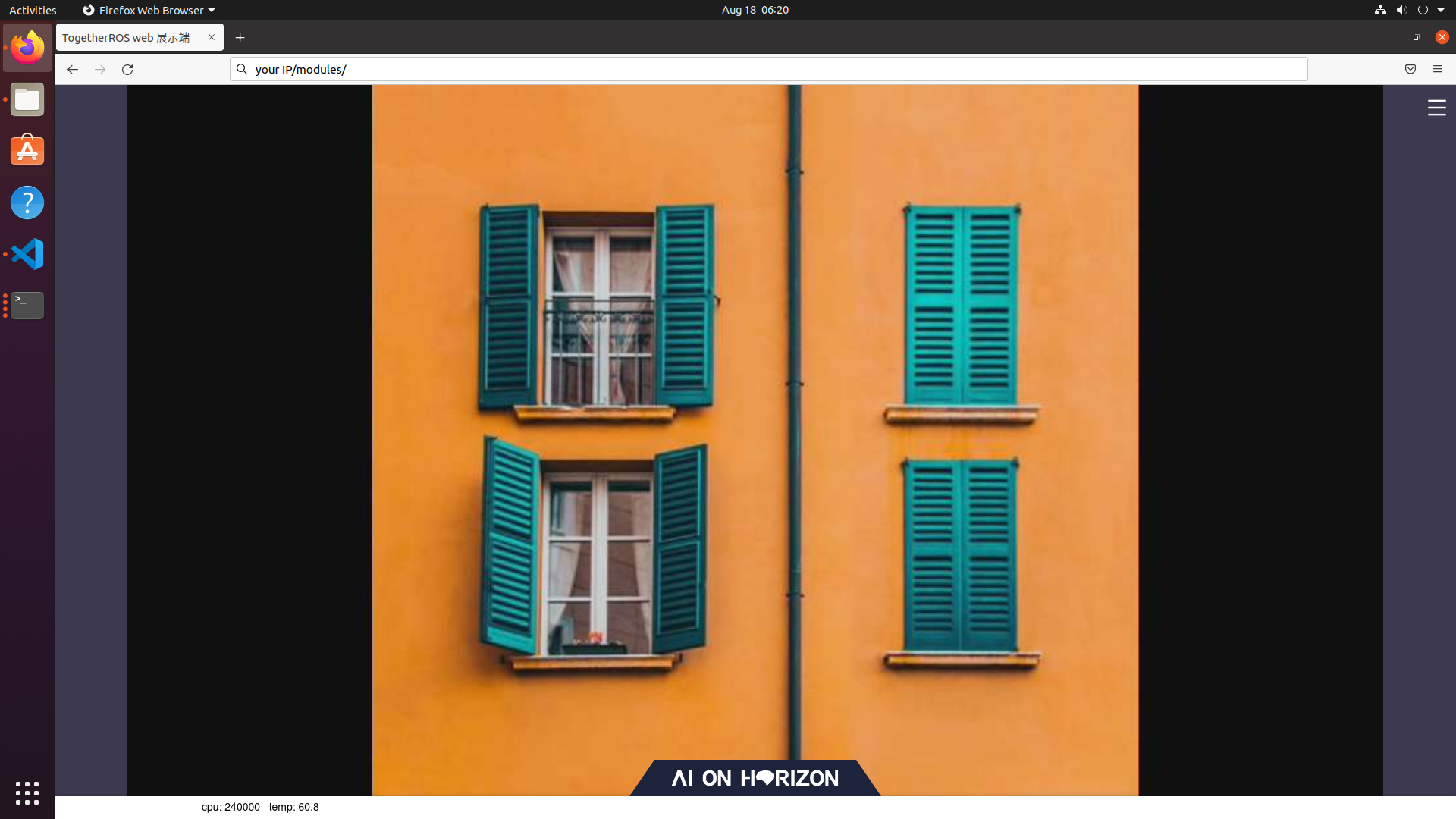
视频发布使用介绍
读取本地video.list文件,获取list文件中的视频文件路径,循环读取视频文件并发布,先使用图像编解码模块将视频流解码成NV12格式图片,再使用图像编解码模块将图片压缩编码成JPEG格式,在PC的Web端展示图片。
旭日X3派
# 配置tros.b环境
source /opt/tros/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的图片文件
cp -r /opt/tros/lib/hobot_image_publisher/config/ .
# 启动launch文件
ros2 launch hobot_image_publisher hobot_image_publisher_videolist_demo.launch.py
X86平台
在浏览器上显示发布的图片,确认PC端已经启动用于Web展示的webserver服务(设备启动后只需要启动一次服务,只有设备重启的情况下需要重新启动服务)。可执行ps -aux命令查看是否有nginx进程,如果有,表示已经启动此服务,如果无,启动服务,运行方法为:
# 配置tros.b环境
source /opt/tros/setup.bash
ros2 launch websocket hobot_websocket_service.launch.py
# 配置tros.b环境
source /opt/tros/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的图片文件
cp -r /opt/tros/lib/hobot_image_publisher/config/ .
# 启动图片发布节点,使用本地MP4格式视频文件进行发布(可以根据自己的需求进行参数配置),暂不支持Web端显示
/opt/tros/lib/hobot_image_publisher/hobot_image_pub --ros-args -p image_source:=./config/video.list -p fps:=30 -p image_format:=mp4
视频发布结果分析
在运行终端输出如下信息:
[INFO] [launch]: All log files can be found below /root/.ros/log/2022-10-22-21-44-03-663907-ubuntu-702475
[INFO] [launch]: Default logging verbosity is set to INFO
webserver has launch
[INFO] [hobot_image_pub-1]: process started with pid [702597]
[INFO] [hobot_codec_republish-2]: process started with pid [702599]
[INFO] [hobot_codec_republish-3]: process started with pid [702601]
[INFO] [websocket-4]: process started with pid [702603]
输出log显示出webserver已启动,hobot_image_pub、hobot_codec_republish、websocket都正常运行
在PC端的浏览器输入http://IP:8000 即可查看图像展示效果(IP为旭日X3派/X86设备的IP地址):
