6.5. 垃圾检测
功能介绍
mono2d_trash_detection package 是基于 hobot_dnn package 开发的2D垃圾目标检测算法示例。与以往功能展示不同,本示例将以2D垃圾检测任务为例,展示如何基于开源框架训练模型、地平线工具链转换模型、地平线机器人开发平台完成算法全流程部署工作。
本package支持直接订阅sensors/msg/Image类型的话题,并且支持读取本地图片的形式进行推理,将算法信息通过话题发布的同时会将结果在Web页面渲染可视化,本地图片回灌时将渲染图片保存在当前目录。
代码仓库:https://c-gitlab.horizon.ai/HHP/box/hobot_perception/mono2d_trash_detection.git
应用场景:室内外垃圾检测,识别出场景中的垃圾,可配合机器人用于垃圾寻找、垃圾捡取(配合机械臂)的APP设计。
算法介绍
本package采用PaddlePaddle开源框架, 利用PPYOLO模型进行垃圾检测任务设计和训练,具体的模型配置为ppyolo_r18vd_coco.yml。
算法支持的目标检测类别如下:
| 类别 | 说明 | 数据类型 |
|---|---|---|
| trash | 垃圾框 | Roi |
支持平台
| 平台 | 运行方式 | 示例功能 |
|---|---|---|
| 旭日X3派 | Ubuntu 20.04 | · 启动MIPI/USB摄像头/本地回灌,推理渲染结果在Web显示/保存在本地 |
| X86 | Ubuntu 20.04 | · 启动本地回灌,推理渲染结果在Web显示/保存在本地 |
准备工作
由于部署阶段我们不考虑算法模型内部的结构信息,只关注算法前后处理环节,前处理部分如图像读取、图像Resize等,后处理部分如检测头解码器、非极大值抑制(NMS)等。这些前后处理的方法在多数同类模型中是一致的,通用性较强,因此可以利用基础部署包进行快速部署。
地平线机器人开发平台提供了dnn_node_example部署包用于快速部署基础算法。目前支持的常见算法有图像分类、2D目标检测、语义分割。其中2D目标检测集成了Fasterrcnn、Fcos、yolov2、yolov3、yolov5、SSD、efficientnet供用户选择。
本示例利用dnn_node_example,通过替换地平线交叉编译模型、后处理配置文件、检测类别配置文件用以适配自定义检测模型。
如果前后处理环节与上述模型不同无法快速适配,自定义部署方法可参考dnn_node_sample示例。
旭日X3派
旭日X3派已烧录好地平线提供的Ubuntu 20.04系统镜像。
旭日X3派已成功安装TogetheROS.Bot。
获得地平线交叉编译模型(如本例中ppyolo_trashdet_416x416_nv12.bin)
后处理配置文件 (如本例中ppyoloworkconfig.json)
检测类别配置文件 (如本例中trash_coco.list)
X86平台
X86环境已配置Ubuntu 20.04系统镜像。
X86环境已成功安装tros.b。
获得地平线交叉编译模型(如本例中ppyolo_trashdet_416x416_nv12.bin)
后处理配置文件 (如本例中ppyoloworkconfig.json)
检测类别配置文件 (如本例中trash_coco.list)
后处理配置文件说明
config_file配置文件格式为json格式,本示例ppyoloworkconfig.json,具体配置如下:
{
"model_file":模型文件的路径
"model_name":模型名称
"dnn_Parser":设置选择内置的后处理算法,示例采用的解析方法同yolov3,采用"yolov3"
"model_output_count":模型输出branch个数
"class_num": 检测类别数
"cls_names_list": 检测类别具体标签
"strides": 每个输出branch步长
"anchors_table": 预设anchors比例
"score_threshold": 置信度阈值
"nms_threshold": NMS后处理IOU阈值
"nms_top_k": NMS后处理选取的框个数
}
说明:实际每个预设anchors大小为 anchors_table x strides
使用介绍
完整算法开发部署流程图:
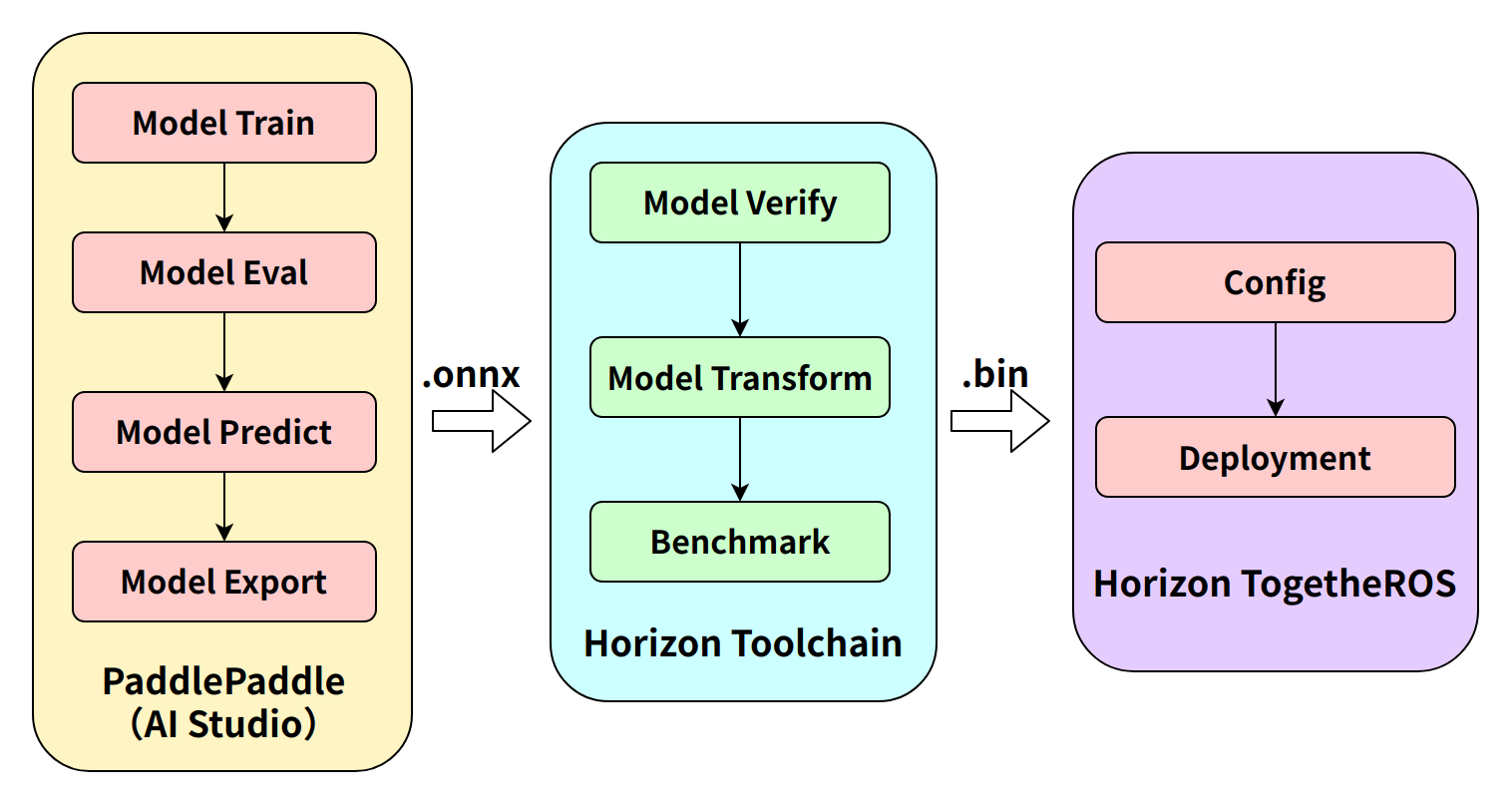
其中第一步Paddle模型训练、第二部工具链模型转换,将在下方链接中介绍,这里将主要介绍上板部署相关流程。
package对外发布包含语义分割和目标检测信息的算法msg,用户可以订阅发布的msg用于应用开发。
旭日X3派
使用MIPI摄像头发布图片
# 配置ROS2环境
source /opt/tros/setup.bash
# 从tros的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/lib/mono2d_trash_detection/config/ .
# 配置MIPI摄像头
export CAM_TYPE=mipi
# 启动launch文件
ros2 launch dnn_node_example hobot_dnn_node_example.launch.py config_file:=config/ppyoloworkconfig.json msg_pub_topic_name:=ai_msg_mono2d_trash_detection image_width:=1920 image_height:=1080
使用usb摄像头发布图片
# 配置ROS2环境
source /opt/tros/setup.bash
# 从tros的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/lib/mono2d_trash_detection/config/ .
# 配置USB摄像头
export CAM_TYPE=usb
# 启动launch文件
ros2 launch dnn_node_example hobot_dnn_node_example.launch.py config_file:=config/ppyoloworkconfig.json msg_pub_topic_name:=ai_msg_mono2d_trash_detection image_width:=1920 image_height:=1080
使用单张回灌图片
# 配置ROS2环境
source /opt/tros/setup.bash
# 从tros的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/lib/mono2d_trash_detection/config/ .
# 启动launch文件
ros2 launch dnn_node_example hobot_dnn_node_example_feedback.launch.py config_file:=config/ppyoloworkconfig.json image:=config/trashDet0028.jpg
X86平台
使用单张回灌图片
# 配置ROS2环境
source /opt/tros/setup.bash
# 从tros的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/lib/mono2d_trash_detection/config/ .
# 启动垃圾检测pkg,将渲染图片保存到本地
ros2 run dnn_node_example example --ros-args -p feed_type:=0 -p image:=config/trashDet0028.jpg -p image_type:=0 -p dump_render_img:=1 -p config_file:=config/ppyoloworkconfig.json
结果分析
使用mipi摄像头发布图片
package初始化后,在运行终端输出如下信息:
[example-3] [WARN] [1665644838.299475772] [example]: This is dnn node example!
[example-3] [WARN] [1665644838.439577121] [example]: Parameter:
[example-3] feed_type(0:local, 1:sub): 1
[example-3] image: config/test.jpg
[example-3] image_type: 0
[example-3] dump_render_img: 0
[example-3] is_shared_mem_sub: 1
[example-3] config_file: config/ppyoloworkconfig.json
[example-3] msg_pub_topic_name_: ai_msg_mono2d_trash_detection
[example-3] [WARN] [1665644838.441379412] [example]: Parameter:
[example-3] model_file_name: config/ppyolo_trashdet_416x416_nv12.bin
[example-3] model_name: ppyolo_trashdet_416x416_nv12
[example-3] [WARN] [1665644838.441523485] [example]: model_file_name_: config/ppyolo_trashdet_416x416_nv12.bin, task_num: 4
[example-3] [C][34177][10-13][15:07:18:448][configuration.cpp:49][EasyDNN]EasyDNN version: 0.4.11
[example-3] [BPU_PLAT]BPU Platform Version(1.3.1)!
[example-3] [HBRT] set log level as 0. version = 3.14.5
[example-3] [DNN] Runtime version = 1.9.7_(3.14.5 HBRT)
[example-3] [WARN] [1665644838.688580704] [dnn]: Run default SetOutputParser.
[example-3] [WARN] [1665644838.688758775] [dnn]: Set output parser with default dnn node parser, you will get all output tensors and should parse output_tensors in PostProcess.
[example-3] [WARN] [1665644838.691224728] [example]: Create ai msg publisher with topic_name: ai_msg_mono2d_trash_detection
[example-3] [WARN] [1665644838.698936232] [example]: Create img hbmem_subscription with topic_name: /hbmem_img
[example-3] [WARN] [1665644839.926634917] [example]: Sub img fps: 32.45, Smart fps: 33.07, infer time ms: 36, post process time ms: 5
[example-3] [WARN] [1665644840.950361855] [example]: Sub img fps: 30.30, Smart fps: 30.21, infer time ms: 40, post process time ms: 3
[example-3] [WARN] [1665644841.971040371] [example]: Sub img fps: 30.39, Smart fps: 30.48, infer time ms: 36, post process time ms: 7
[example-3] [WARN] [1665644842.972618649] [example]: Sub img fps: 29.94, Smart fps: 29.88, infer time ms: 36, post process time ms: 3
[example-3] [WARN] [1665644843.982243911] [example]: Sub img fps: 29.62, Smart fps: 29.70, infer time ms: 36, post process time ms: 3
[example-3] [WARN] [1665644844.995728928] [example]: Sub img fps: 29.79, Smart fps: 29.73, infer time ms: 36, post process time ms: 6
实时运行效果:

使用单张回灌图片
package初始化后,在终端输出如下信息:
[example-1] [INFO] [1665646256.967568866] [dnn]: The model input 0 width is 416 and height is 416
[example-1] [WARN] [1665646256.967698807] [dnn]: Run default SetOutputParser.
[example-1] [WARN] [1665646256.967754550] [dnn]: Set output parser with default dnn node parser, you will get all output tensors and should parse output_tensors in PostProcess.
[example-1] [INFO] [1665646256.967794962] [dnn impl]: Set default output parser
[example-1] [INFO] [1665646256.967972439] [dnn]: Task init.
[example-1] [INFO] [1665646256.970036756] [dnn]: Set task_num [4]
[example-1] [INFO] [1665646256.970176988] [example]: The model input width is 416 and height is 416
[example-1] [WARN] [1665646256.970260061] [example]: Create ai msg publisher with topic_name: hobot_dnn_detection
[example-1] [INFO] [1665646256.977452592] [example]: Dnn node feed with local image: config/trashDet0028.jpg
[example-1] [INFO] [1665646257.027170005] [dnn]: task id: 3 set bpu core: 2
[example-1] [INFO] [1665646257.057492754] [example]: Output from frame_id: feedback, stamp: 0.0
[example-1] [INFO] [1665646257.063816821] [PostProcessBase]: out box size: 1
[example-1] [INFO] [1665646257.064070497] [PostProcessBase]: det rect: 216.061 223.173 317.97 282.748, det type: trash, score:0.80733
[example-1] [INFO] [1665646257.064206479] [ClassificationPostProcess]: out cls size: 0
[example-1] [INFO] [1665646257.068688365] [ImageUtils]: target size: 1
[example-1] [INFO] [1665646257.068836554] [ImageUtils]: target type: trash, rois.size: 1
[example-1] [INFO] [1665646257.068884048] [ImageUtils]: roi.type: , x_offset: 216 y_offset: 223 width: 101 height: 59
[example-1] [WARN] [1665646257.071375688] [ImageUtils]: Draw result to file: render_feedback_0_0.jpeg
本地渲染效果:
