手势识别
功能介绍
手势识别算法示例订阅包含人手框、人手关键点信息的算法msg,利用BPU进行推理,发布包含手势信息的智能结果msg。
算法支持的手势识别类别,以及手势类别在算法msg(Attribute成员,type为”gesture”)中对应的数值如下:
| 手势 | 说明 | 数值 |
|---|---|---|
| ThumbUp | 竖起大拇指 | 2 |
| Victory | “V”手势 | 3 |
| Mute | “嘘”手势 | 4 |
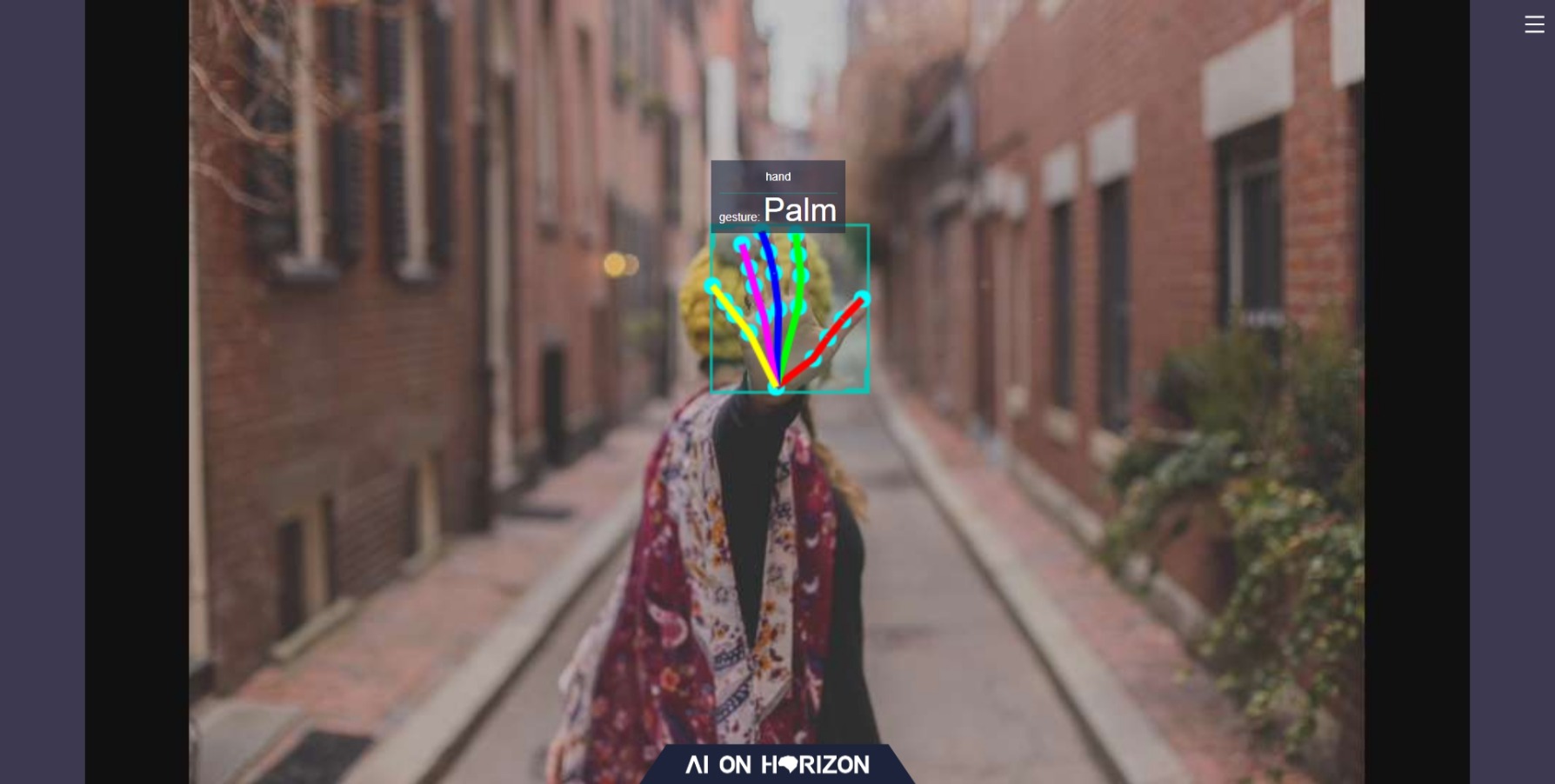
| Palm | 手掌 | 5 |
| Okay | OK手势 | 11 |
| ThumbLeft | 大拇指向左 | 12 |
| ThumbRight | 大拇指向右 | 13 |
| Awesome | 666手势 | 14 |
代码仓库:
https://c-gitlab.horizon.ai/HHP/box/hobot_perception/hand_lmk_detection
https://c-gitlab.horizon.ai/HHP/box/hobot_perception/hand_gesture_detection
https://c-gitlab.horizon.ai/HHP/box/hobot_perception/mono2d_body_detection
应用场景:手势识别算法集成了人手关键点检测,手势分析等技术,使得计算机能够将人的手势解读为对应指令,可实现手势控制以及手语翻译等功能,主要应用于智能家居,智能座舱、智能穿戴设备等领域。
小车手势控制案例:5.5. 小车手势控制 — 地平线机器人平台用户手册 1.0 文档 (horizon.ai)
基于手势识别以及人体姿态分析实现游戏人物控制案例:玩转X3派,健身游戏两不误 (horizon.ai)
支持平台
| 平台 | 运行方式 | 示例功能 |
|---|---|---|
| 旭日X3派 | Ubuntu 20.04 | · 启动MIPI/USB摄像头,并通过Web展示推理渲染结果 |
准备工作
X3平台
旭日X3派已烧录好地平线提供的Ubuntu 20.04系统镜像。
旭日X3派已成功安装TogetheROS.Bot。
旭日X3派已安装MIPI或者USB摄像头。
确认PC机能够通过网络访问旭日X3派。
使用介绍
手势识别(hand_gesture_detection)package订阅人手关键点检测package发布的人手关键点检测结果,经过推理后发布算法msg,通过websocket package实现在PC端浏览器上渲染显示发布的图片和对应的算法结果。
使用MIPI摄像头发布图片
# 配置tros.b环境
source /opt/tros/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/lib/mono2d_body_detection/config/ .
cp -r /opt/tros/lib/hand_lmk_detection/config/ .
cp -r /opt/tros/lib/hand_gesture_detection/config/ .
# 配置MIPI摄像头
export CAM_TYPE=mipi
# 启动launch文件
ros2 launch hand_gesture_detection hobot_hand_gesture_detection.launch.py
使用USB摄像头发布图片
# 配置tros.b环境
source /opt/tros/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/lib/mono2d_body_detection/config/ .
cp -r /opt/tros/lib/hand_lmk_detection/config/ .
cp -r /opt/tros/lib/hand_gesture_detection/config/ .
# 配置USB摄像头
export CAM_TYPE=usb
# 启动launch文件
ros2 launch hand_gesture_detection hobot_hand_gesture_detection.launch.py
结果分析
在运行终端输出如下信息:
[hand_gesture_detection-5] [C][32711][08-12][09:39:39:575][configuration.cpp:49][EasyDNN]EasyDNN version: 0.4.11
[hand_gesture_detection-5] [DNN] Runtime version = 1.9.7_(3.14.5 HBRT)
[hand_gesture_detection-5] [WARN] [1660268379.611419981] [hand gesture det node]: input_idx: 0, tensorType = 8, tensorLayout = 0
[hand_gesture_detection-5] [WARN] [1660268379.619313022] [hand gesture det node]: Create subscription with topic_name: /hobot_hand_lmk_detection
[hand_gesture_detection-5] [WARN] [1660268379.629207314] [hand gesture det node]: ai_msg_pub_topic_name: /hobot_hand_gesture_detection
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_euclid_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_euclid_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[hand_gesture_detection-5] [WARN] [1660268381.026173815] [hand_gesture_det]: Sub smart fps 31.16
[hand_gesture_detection-5] [WARN] [1660268381.206196565] [hand_gesture_det]: Pub smart fps 30.17
[hand_gesture_detection-5] [WARN] [1660268382.054034899] [hand_gesture_det]: Sub smart fps 30.19
[hand_gesture_detection-5] [WARN] [1660268382.234087357] [hand_gesture_det]: Pub smart fps 30.19
[hand_gesture_detection-5] [WARN] [1660268383.055988982] [hand_gesture_det]: Sub smart fps 29.97
[hand_gesture_detection-5] [WARN] [1660268383.235230316] [hand_gesture_det]: Pub smart fps 30.00
[hand_gesture_detection-5] [WARN] [1660268384.087152150] [hand_gesture_det]: Sub smart fps 30.10
[hand_gesture_detection-5] [WARN] [1660268384.256141566] [hand_gesture_det]: Pub smart fps 30.39
输出log显示,程序运行成功,推理时算法输入和输出帧率为30fps,每秒钟刷新一次统计帧率。
输出log显示,订阅到的算法msg中有一个hand(包含人手框和人手关键点检测结果),手势识别算法输出的手势分类结果是“Palm”手势(分类结果为5)。
在PC端的浏览器输入http://IP:8000 即可查看图像和算法渲染效果(IP为旭日X3派的IP地址):