5.8. 小车车位寻找
功能介绍
车位寻找控制App功能为通过车位检测算法指导机器人运动到停车位,包括左右旋转和前后平移运动。App由MIPI图像采集、车位检测算法、车位寻找控制策略、图像编解码、Web展示端组成,流程如下图:
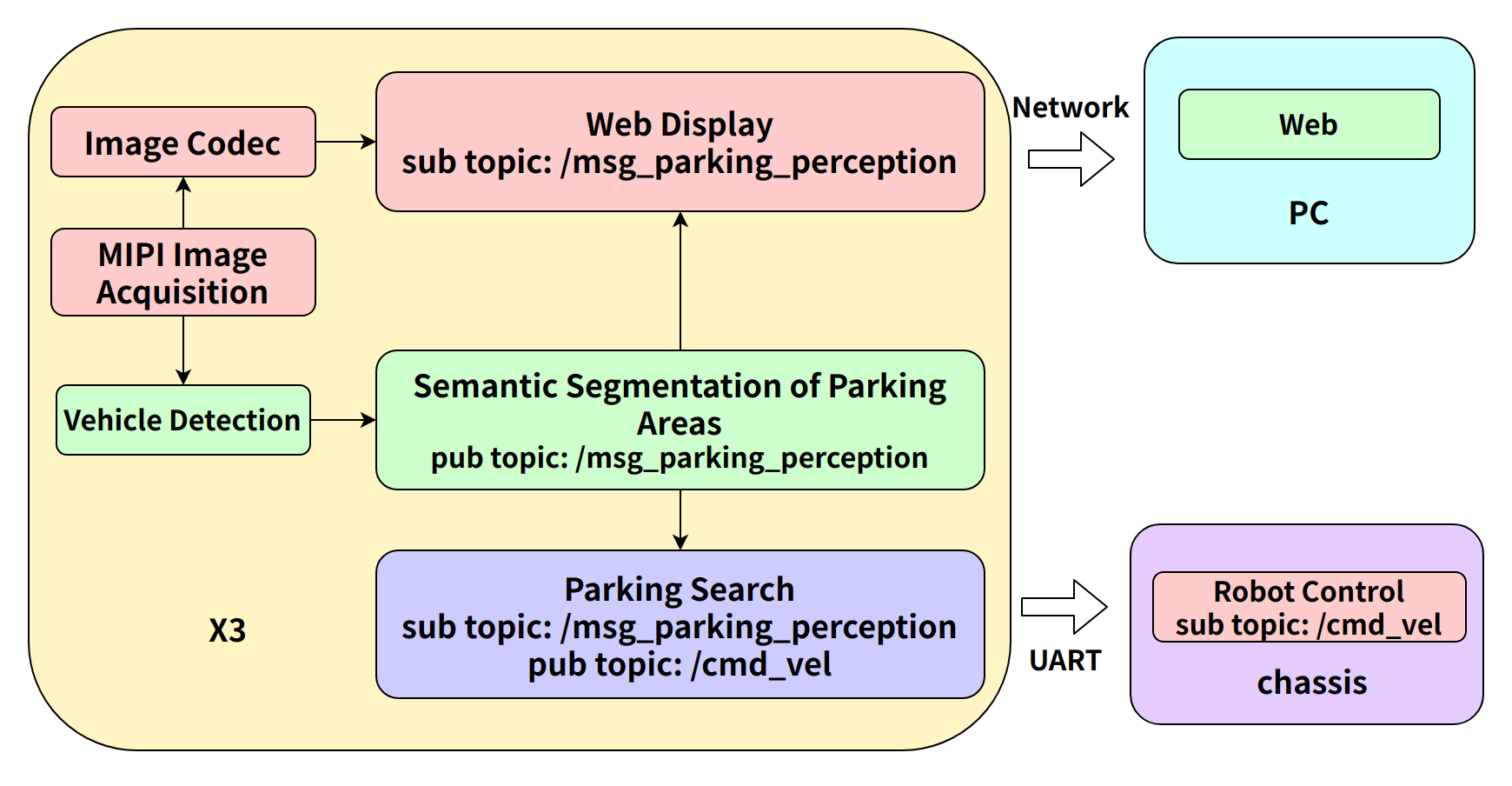
App通过车位寻找控制策略发布的控制指令直接控制实物小车,也可以利用PC端Gazebo仿真环境下的虚拟小车进行测试。
代码仓库:https://c-gitlab.horizon.ai/HHP/box/hobot_interactions/parking_search.git
支持平台
| 平台 | 运行方式 | 示例功能 |
|---|---|---|
| 旭日X3派 | Ubuntu 20.04 | 启动MIPI/USB摄像头获取图像,并进行停车区域检测和车位寻找,最后通过实车运动展示寻找效果 |
设计说明
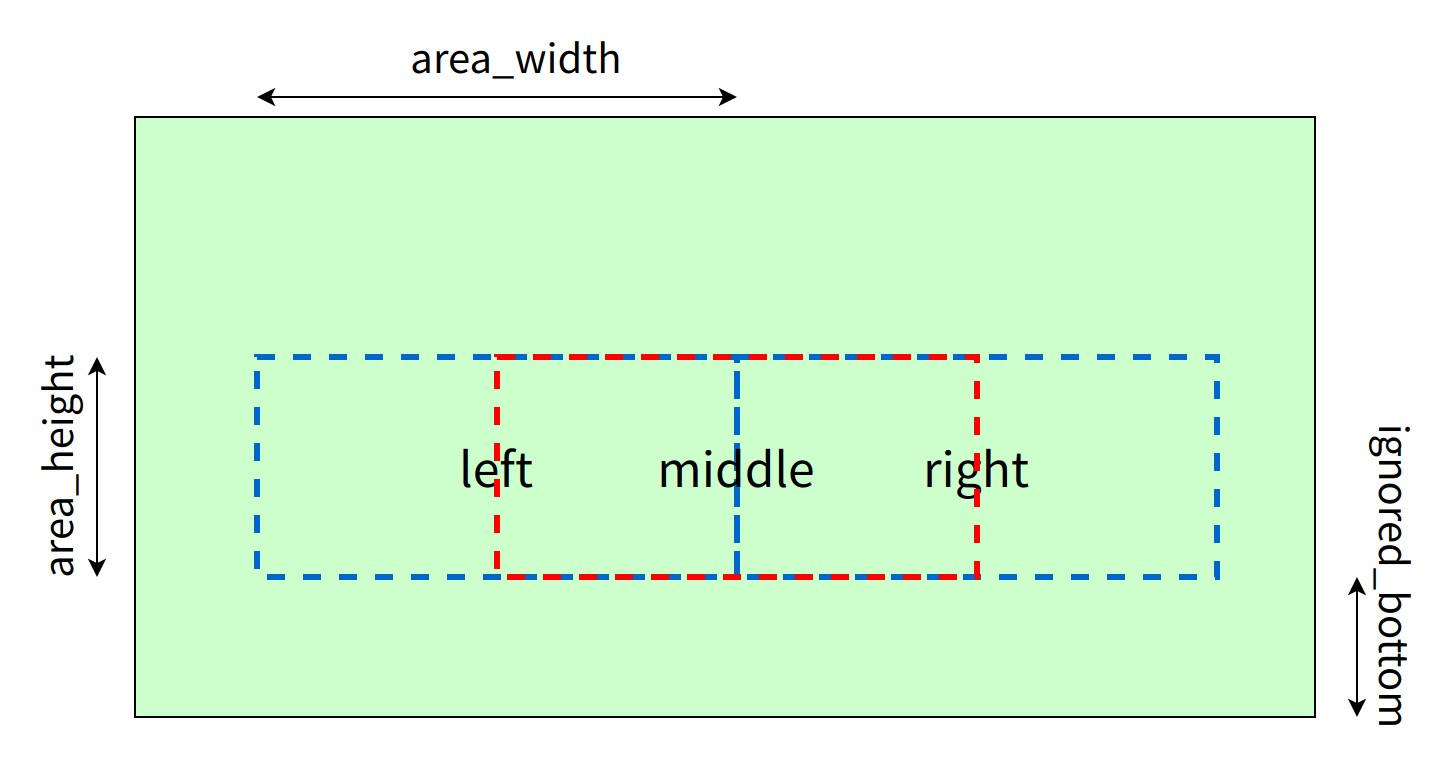
1.视野设置:
将视野场景区域分为“左”、“中”、“右”三个区域。计算每个区域内停车区域和行车区域的IOU,根据阈值判断对应区域类型,从而完成小车运动决策。
2.阈值设置:
| 视野区域 | 左 | 中 | 右 |
|---|---|---|---|
| 停车区域 IOU | 0.6 | 0.7 | 0.6 |
| 行车区域 IOU | 0.8 | 0.9 | 0.8 |
3.类别设置:
| 视野区域 | 道路 | 背景 | 车道线 | 标志线 | 车位线 | 车位区域 | 停车杆 | 地锁 |
|---|---|---|---|---|---|---|---|---|
| 停车区域 IOU | √ | √ | ||||||
| 行车区域 IOU | √ | √ | √ | √ | √ |
说明:由于实际检测中,由于算法本身检测精度不能达到100%,存在将行车区域误检为停车区域的情况,因此计算行车区域时将停车区域类别包括其中。
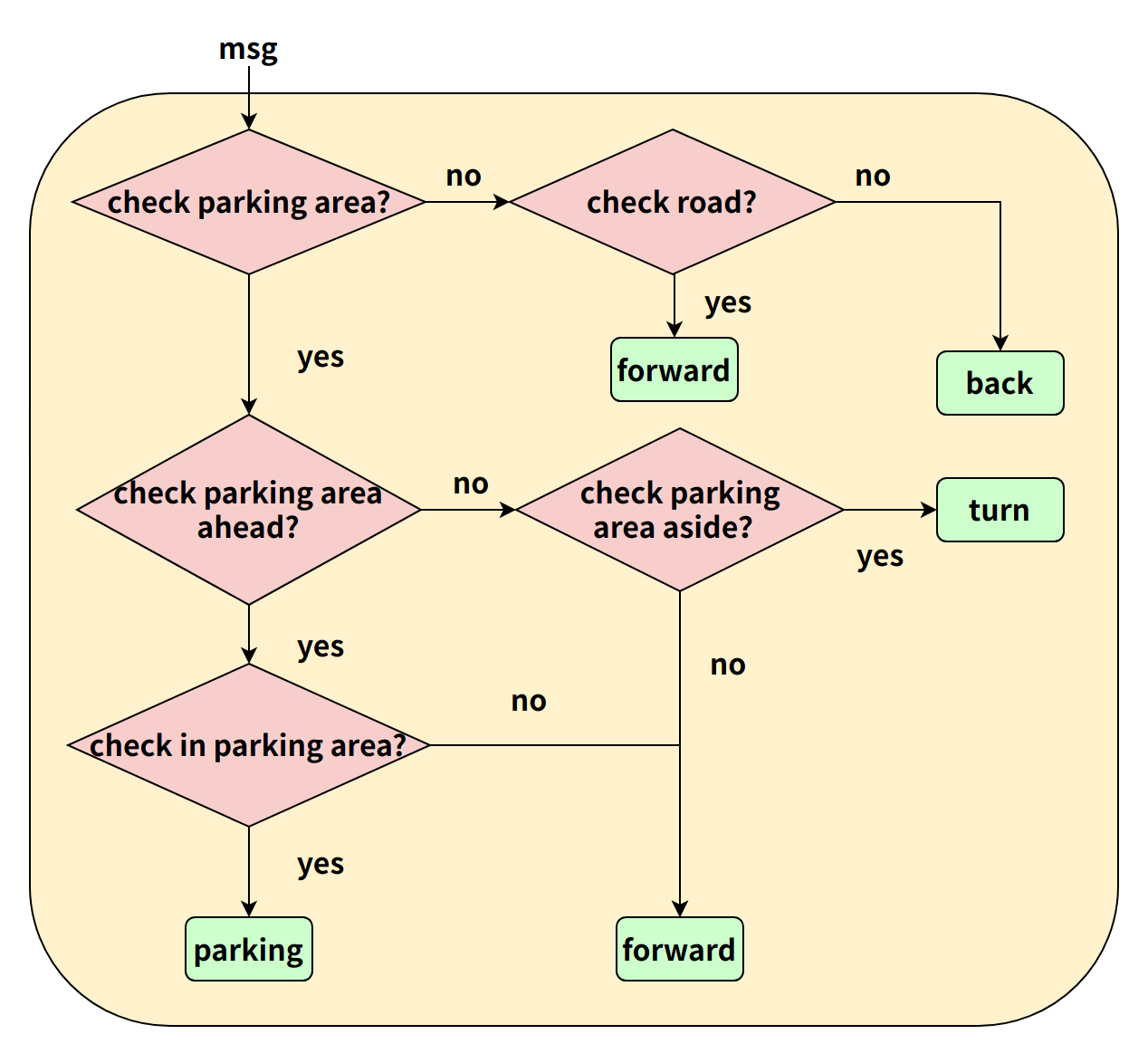
4.算法流程:
准备工作
旭日X3派
旭日X3派已烧录好地平线提供的Ubuntu 20.04系统镜像。
旭日X3派已成功安装TogetheROS.Bot。
旭日X3派已安装MIPI或者USB摄像头。
一台古月居小车作为控制下位机。
使用介绍
旭日X3派
将小车置于水平地面,调整相机角度为水平,运行车位寻找App后,小车根据停车区域检测算法的结果,自动进行决策并控制小车运动,直到找到车位并进入车位停止。
APP启动后可以在PC端浏览器上渲染显示sensor发布的图片和对应的算法结果(浏览器输入http://IP:8000,IP为旭日X3派的IP地址)。
打开Web端,需打开界面右上角设置,选中”全图分割“选项,可显示渲染效果。(参考4.2 Boxs应用算法——室外停车区域检测)
启动古月居小车,在旭日X3派上运行控制下位机节点:
source /opt/tros/setup.bash
source /userdata/originbot/local_setup.bash
ros2 run originbot_base originbot_base
启动成功后,旭日X3派输出log信息:
Loading parameters:
- port name: ttyS3
- correct factor vx: 1.0000
- correct factor vth: 1.000000
[INFO] [1662551769.540781132] [originbot_base]: originbot serial port opened
[INFO] [1662551769.741758424] [originbot_base]: IMU calibration ok.
[INFO] [1662551769.742268424] [originbot_base]: OriginBot Start, enjoy it.
使用MIPI摄像头发布图片
# 配置tros.b环境
source /opt/tros/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/lib/parking_perception/config/ .
# 配置MIPI摄像头
export CAM_TYPE=mipi
# 启动launch文件
ros2 launch parking_search hobot_parking_search.launch.py
使用USB摄像头发布图片
# 配置tros.b环境
source /opt/tros/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/lib/parking_perception/config/ .
# 配置USB摄像头
export CAM_TYPE=usb
# 启动launch文件
ros2 launch parking_search hobot_parking_search.launch.py
结果分析
1.小车在行车区域搜寻前进时旭日X3派运行终端输出log信息,其中控制小车以0.1m/s的速度前进运动(do move, direction: 0, step: 0.100000)。
[parking_search-4] [WARN] [1661942399.306904646] [ParkingSearchEngine]: do move, direction: 0, step: 0.100000
[parking_search-4] [WARN] [1661942399.343490021] [ParkingSearchEngine]: do move, direction: 0, step: 0.100000
[parking_perception-3] [WARN] [1661942399.347396979] [parking_perception]: input fps: 29.97, out fps: 29.67
[parking_search-4] [WARN] [1661942399.410602188] [ParkingSearchEngine]: do move, direction: 0, step: 0.100000
[parking_search-4] [WARN] [1661942399.449585563] [ParkingSearchEngine]: do move, direction: 0, step: 0.100000

2.小车发现车位后转向时在旭日X3派运行终端输出log信息:
[parking_search-4] [WARN] [1662539779.408424498] [ParkingSearchEngine]: do rotate, direction: 2, step: 0.100000
[parking_search-4] [WARN] [1662539779.442805415] [ParkingSearchEngine]: do rotate, direction: 2, step: 0.100000
[parking_search-4] [WARN] [1662539779.483669831] [ParkingSearchEngine]: do rotate, direction: 2, step: 0.100000
[parking_search-4] [WARN] [1662539779.522690915] [ParkingSearchEngine]: do rotate, direction: 2, step: 0.100000
[parking_search-4] [WARN] [1662539779.563660873] [ParkingSearchEngine]: do rotate, direction: 2, step: 0.100000
[parking_perception-3] [WARN] [1662539779.595755290] [parking_perception]: input fps: 29.87, out fps: 29.63
[parking_search-4] [WARN] [1662539779.604272498] [ParkingSearchEngine]: do rotate, direction: 2, step: 0.100000

3.小车确定车位后前进并最终停止时在旭日X3派运行终端输出log信息:
[parking_search-4] [WARN] [1662539796.196264298] [ParkingSearchEngine]: do move, direction: 0, step: 0.100000
[parking_search-4] [WARN] [1662539796.227805589] [ParkingSearchEngine]: Find Target, current count: 398, target count: 400
[parking_search-4] [WARN] [1662539796.267424798] [ParkingSearchEngine]: do move, direction: 0, step: 0.100000
[parking_search-4] [WARN] [1662539796.317332964] [ParkingSearchEngine]: Find Target, current count: 399, target count: 400
[parking_search-4] [WARN] [1662539796.346787673] [ParkingSearchEngine]: do move, direction: 0, step: 0.100000
[parking_search-4] [WARN] [1662539796.386203756] [ParkingSearchEngine]: Find Target, current count: 400, target count: 400
[parking_perception-3] [WARN] [1662539796.428427089] [ParkingSearchEngine]: input fps: 29.90, out fps: 29.74
[parking_search-4] [WARN] [1662539796.465178589] [ParkingSearchEngine]: Parking Area Arrived !!!
[parking_search-4] [WARN] [1662539796.506218048] [ParkingSearchEngine]: Parking Area Arrived !!!
[parking_search-4] [WARN] [1662539796.547036881] [ParkingSearchEngine]: Parking Area Arrived !!!

PC端在终端使用ros2 topic list命令可以查询到旭日X3派的topic信息:
$ ros2 topic list
/ai_msg_parking_perception
/cmd_vel
/hbmem_img080a1b02022201080403012021072312
/image
/imu
/odom
/originbot_status
/parameter_events
/rosout
/tf
其中/image_jpeg是旭日X3派发布的从MIPI sensor采集图像后经过JPEG格式编码的图片,/ai_msg_parking_perception是旭日X3派发布的包含车位检测信息的算法msg,/cmd_vel是旭日X3派发布的运动控制指令。